ІНСТРУКЦІЯ З ОРГАНІЗАЦІЇ І НАЛАШТУВАННЯ СИСТЕМИ BITREK CONNECT
Терміни та визначення
CAN (Control Area Network) – послідовний цифровий інтерфейс зв'язку шинного типу, що відповідає міжнародному стандарту ISO 11898-1:2003. Шина CAN служить для об'єднання в єдину мережу різних виконавчих електронних пристроїв та датчиків як у системах промислової автоматизації, так і автомобільної промисловості.
FMS – пакети даних бортових інформаційних шин транспортних засобів, які відповідають документу FMS-Standard Interface Description. FMS-Standard є відкритим стандартом FMS-інтерфейсу, розробленого провідними світовими виробниками вантажних автомобілів.
J1939 – стандарт комунікаційної та діагностичної мережі для різних машин. Спочатку розроблявся для вантажівок. Мережа, створена на основі J1939, як канальний рівень використовує комунікаційну шину CAN стандарту CAN 2.0b. В даний час стандарт J1939 знаходить широке застосування у сільськогосподарській техніці, автобусах, вантажних автомобілях.
Connect-Bus – телематична шина транспортного засобу, яка об'єднує в єдину мережу всі пристрої системи Connect. Фізично реалізована на основі інтерфейсу CAN. Протокол обміну інформацією з шини Connect-Bus побудований на основі протоколу J1939.
PGN (Parameter Group Number) – номер групи параметрів, що визначає вміст відповідного повідомлення шини CAN згідно з J1939. Термін PGN використовується для позначення повідомлень шини CAN.
Змінна, що транслюється в шину Connect-Bus – певний параметр у повідомленні шини Connect-Bus. Кожна змінна має низку параметрів, таких як довжина даних, тип даних, чисельне значення.
Протокол – набір угод логічного рівня, що дозволяє здійснювати з'єднання та обмін даними між двома та більше включеними до мережі пристроями. Ці угоди задають одноманітний спосіб передачі і обробки помилок.
Модуль системи Connect – модуль, що входить до системи Connect, що виконує певні функції. Кожен модуль підключений до шини Connect-Bus та обмінюється даними з іншими модулями.
Призначення системи
Система Bitrek Connect призначена для віддаленого відстеження розташування та стану рухомих об'єктів у режимі реального часу з використанням різних систем супутникового стеження та передачі даних за допомогою мобільного зв'язку. Крім того, система може приймати, збирати та обробляти дані з різного додаткового обладнання.
Система Bitrek Connect призначена для вирішення складних комплексних завдань. Залежно від підключених до системи додаткових модулів можна створювати різні конфігурації системи Connect. Таким чином, можна вирішувати задачі для різного типу транспорту:
- трактори
- комбайни
- паливозаправники
- пасажирський транспорт
- таксі
- потяги
- крани
- рефрижератори
- аграрна спецтехніка
- будівельна спецтехніка
Також є можливість поступового розширення системи, додаючи до неї нові модулі та підключаючи нові датчики. При цьому немає потреби змінювати вже існуюче обладнання. Крім того, є можливість створення унікальних розробок та доробок модулів, що підключаються до системи на замовлення.
Організація системи
В основі організації системи лежить CAN-інтерфейс, що дозволяє підключити до системи велику кількість додаткових датчиків. Трекер системи Bitrek Connect не має звичного набору цифрових інтерфейсів, дискретних та аналогових входів. Натомість він оснащений одним CAN-інтерфейсом (далі – Connect-Bus) і може бути налаштований на прийом інформації з різних додаткових модулів системи. Модулі, у свою чергу, виконані у вигляді окремих пристроїв, що підключаються до шини Connect-Bus і можуть залежно від призначення обробляти дані з різних датчиків і передавати дані в шину.
Інформація, що передається модулями в шину системи, може бути використана як трекером передачі її на сервер, а й іншими пристроями у системі Connect. Наприклад, модуль RL02 (модуль керування вивантаженням комбайна) може безпосередньо взаємодіяти з модулем BL01 (модуль для ідентифікації «Свій-Чужий»).
Трекер системи Bitrek Connect, як і модулі системи, може передавати в Connect-Bus різну інформацію: координати, швидкість, пробіг тощо. Ця інформація, у свою чергу, може бути використана іншими пристроями у системі. Крім того, за допомогою окремого модуля можна безпосередньо підключитись до CAN-шини транспортного засобу за протоколом FMS.
ВАЖЛИВО: Не дупускається пряме підключення шини CAN транспортного засобу до телематичної шини Connect-Bus. Якщо таке підключення необхідне, воно провадиться за допомогою спеціального модуля – шлюзу CN01 або CN03.
Топологія системи
Для передачі даних у шині Connect-Bus використовується диференціальна лінія зв'язку – кручена пара, сигнали в якій перїдуть у диференціальному режимі. Лінії зв'язку називаються CAN-High та CAN-Low (далі – CAN-H та CAN-L) і можуть бути підключені безпосередньо до пристроїв.
Система Bitrek Connect, створена на базі модулів, що підтримують шину Connect-Bus, є одноранговою мережею, а це означає, що будь-який модуль, підключений до шини, може отримати незалежний доступ до неї і будь-яке повідомлення може бути надіслане одному або декільком модулям.
Для коректної роботи системи необхідно на першому та останньому модулях, підключених до шини Connect-Bus, встановлювати узгоджувальні резистори номіналом 120 Ом між лініями CAN-H та CAN-L. Приклад апаратної реалізації системи показано на рис. 1
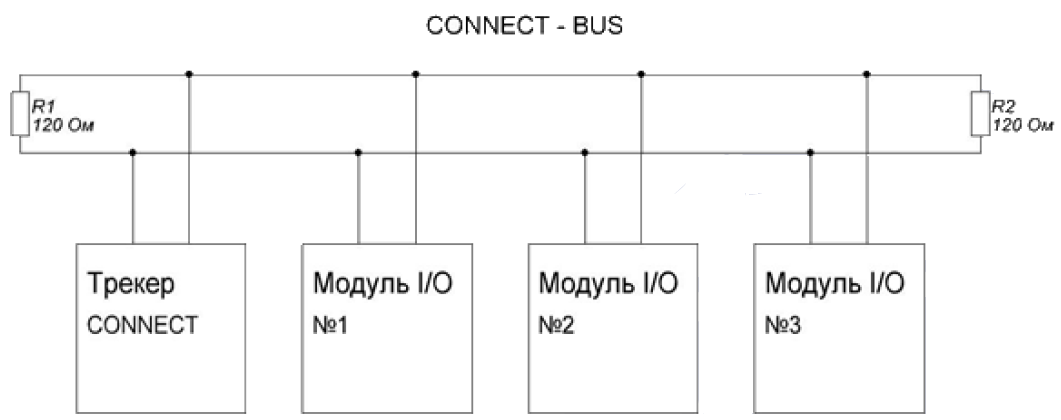
Рис.1 Топологія шини Connect-Bus
Для зручності складання системи Bitrek Connect узгоджувальні резистори вже встановлені на платах більшості модулів системи. Кожен резистор, встановлений на платі модуля, може бути підключений до шини CAN, або не задіяний. Для включення узгоджувального резистора необхідно встановити джампер (перемичку) в роз'єм, розташований на платі модуля, і підписаний як «120Е».
Примітка: На платі трекера системи Connect такий резистор відсутній.
Якщо існує потреба підключити узгоджувальний резистор у місце шини Connect Bus, в якому встановлено модуль, що не має вбудованого резистора, можна використовувати спеціальний розгалужувач шини Connect-Bus має такий узгоджувальний резистор.
Розгалужувач шини Connect-Bus є конектором, оснащеним чотирма рівнозначними роз'ємами Connect-Bus. Ці розгалужувачі використовуються для побудови телематичної шини системи Bitrek Connect і служать для паралельного підключення модулів системи з метою об'єднання їх в єдину шину. Розгалужувачі поділяються на два види: червоні (з вбудованим узгоджувальним резистором) та сині (без узгоджувального резистора).

Рис.2. Зовнішній вигляд розгалужувачів шини Connect-Bus
Розгалужувачі оснащені чотирма стандартними роз'ємами шини Connect-Bus. Стандартний роз'єм Connect-Bus є 4-pin Micro Fit роз'ємом, в який виведені лінії живлення модулів і сигнальні лінії CAN-H і CAN-L. Цоколівка роз'єму вказана на малюнку 3.
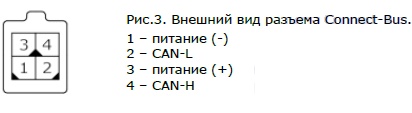
Такими стандартними роз'ємами оснащена більшість модулів системи Connect. Модулі для зовнішнього монтажу (наприклад, модуль GS01 або BL01) не мають такого гнізда. Замість нього модулі мають на платі гвинтові затискачі для підключення кабелю. Також існують модулі, які вже оснащені кабелем і не мають стандартного роз'єму (приклад – модуль MF01). У такому випадку виконуючи монтаж потрібно самостійно встановити роз'єм Connect-Bus на кабель після монтажу обладнання та прокладання кабелю. Для встановлення роз'єму потрібно скористатися спеціальним інструментом – обтисканням для контактів Micro-Fit. При монтажі кожен контакт роз'єму окремо обжимається на жилах, після чого контакти вставляються в гніздо.
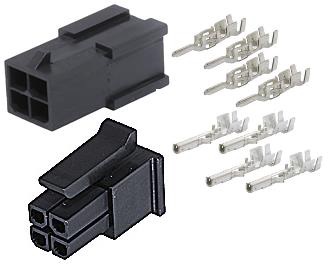
Рис.4. Зовнішній вигляд роз'ємів та контактів Micro-Fit
Для монтажу шини Connect-Bus можна використовувати багатожильний кабель перетином 0.35 мм2 з крученими жилами.
Для з'єднання елементів шини Connect-Bus між собою (наприклад, з'єднання «модуль – модуль» або «модуль – розгалужувач») використовуються кабелі CAN-CAN – кабель, що складається з чотирьох окремих дротів, які обабіч оснащені роз'ємами Connect-Bus.

Рис.5. Зовнішній вигляд кабелю CAN-CAN.
Опис дротів:
- Жовтий – живлення (+)
- Чорний - живлення (-)
- Білий – CAN-H
- Синій – CAN-L
Довжина такого кабелю становить 10-20 см. Використовувати його можна в тих випадках, коли елементи системи, що з'єднуються, знаходяться поруч один з одним (наприклад, при монтажі обладнання під панеллю в салоні транспортного засобу, або в окремому боксі. Якщо є необхідність у більш довгому кабелі – він прокладається окремо, потім його кінці встановлюються роз'єми Micro-Fit.
Живлення до системи подається за допомогою спеціального кабелю живлення. Кабель живлення оснащений одним стандартним роз'ємом Connect-Bus і має два дроти для підведення живлення до системи.

Рис.6. Зовнішній вигляд кабелю живлення.
Опис дротів:
- Жовтий – живлення (+)
- Чорний - живлення (-)
Кількість модулів системи Connect, їх тип, а також зона їх розміщення визначають необхідну кількість і види з'єднувальних елементів системи. Для наочності нижче описано приклад вибору комплектації.
Приклад: створити шину Connect-Bus, у складі якої буде трекер BI 810 Connect, модуль EX02 та модуль BL01. Трекер та модуль EX02 встановлюється під передньою панеллю транспортного засобу, а модуль BL01 – у задній частині транспортного засобу. Для вирішення такого завдання потрібно:
- Червоний розгалужувач – 1 шт
- Кабель живлення – 1 шт
До червоного розгалужувача підключається трекер, модуль EX02, кабель живлення. Залишається один вільний роз'єм у розгалужувачі – до нього підключається модуль конфігуратора для налаштування системи. вільний роз'єм Connect-Bus на модулі EX02, що залишився, використовується для підключення модуля BL01, для підключення якого необхідно окремо придбати кабель і роз'єми Micro-Fit з контактами. Встановлення роз'ємів здійснюється після прокладання кабелю.
При цьому для узгодження шини Connect-Bus необхідно на платі модуля EX02 відключити узгоджувальний резистор (зняти джампер із роз'єму на платі), а в модулі BL01 – підключити узгоджувальний резистор (встановити джампер). Таким чином буде сформована шина Connect-Bus, найдовша частина її пов'язуватиме між собою модулі, встановлені в кабіні під панеллю - з одного боку, і модуль BL01, встановлений на задній стінці транспортного засобу - з іншого боку. По обидва боки довга лінія шини буде узгоджена резисторами: з боку кабіни резистор встановлений у червоному розгалужувачі, з задньої стінки транспортного засобу – у модулі BL01.
ВАЖЛИВО! Не допускається підключення в шину Connect-Bus більше двох узгоджувальних резисторів. Результуючий опір між CAN-H та CAN-L становить 60 Ом.
Налаштування системи Bitrek Connect
Загальний опис периферійних модулів Bitrek Connect
Периферійні модулі Bitrek Connect виконані у вигляді окремих пристроїв, що підключаються до шини Connect-Bus. У свою чергу модулі поділяються на дві версії: першої версії (v01) та другої версії (v02). Функціонально вони нічим не відрізняються, проте існує різниця у їх виконанні та способі підключення.
Зовнішній вигляд модулів v01 та v02 показаний на рисунках 7 та 8.

Рис.7. Зовнішній вигляд модуля v01

Рис.8. Зовнішній вигляд модуля v02
Модулі Bitrek Connect v01 обладнані одним чотириконтактним роз'ємом шини Connect-Bus і не оснащені узгоджуючим резистором. Для побудови шини Connect-Bus із використанням даних модулів у будь-якому випадку потрібно використовувати розгалужувачі.
Модулі Bitrek Connect v02 обладнані двома рівнозначними чотириконтактними роз'ємами шини Connect-Bus та узгоджуючим резистором, встановленим на платі модуля. Включення даного резистора здійснюється установкою перемички (джампера) в роз'єм на платі, підписаний “120Е”.
Послідовність налаштування Bitrek Connect. Взаємодія трекера та периферійних модулів
Кожен модуль системи Bitrek Connect має свій окремий посібник. У такому посібнику описані технічні характеристики модулів, порядок їх введення в експлуатацію, призначення висновків та вся необхідна технічна інформація.
Кожен окремий модуль системи має список параметрів, що настроюються (кожний параметр має свій номер – ID параметра) і список змінних, які він транслює в шину Connect-Bus. Змінні несуть інформацію, отриману з датчиків, які підключені до периферійних модулів системи Bitrek Connect. Кожен модуль транслює ці змінні у шину. Трекер системи, який у свою чергу підключений до шини, може бути налаштований на прийом та обробку цих змінних. Крім змінних, які містять інформацію, отриману з датчиків, кожен модуль транслює в шину системні змінні: апаратна версія модуля, версія ПЗ, лічильник перезавантажень модуля і лічильник часу роботи модуля з моменту перезавантаження.
Відповідно до структури організації системи існує умовна послідовність її налаштування, яка ділиться на 3 етапи:
Етап 1. Налаштування мережевих адрес модулів. На даному етапі кожному модулю окремо призначається свою унікальну мережеву адресу на шині Connect-Bus. При налаштуванні мережевих адрес важливо проводити настроювання адреси кожному модулю окремо, не об'єднуючи їх разом, щоб уникнути можливих конфліктів адрес. Корисна порада: Для зручності налаштування та віддаленого обслуговування системи можна заздалегідь визначити діапазони мережевих адрес для кожного типу модуля. Наприклад, модуль RF02 може займати мережеві адреси 2-3, модуль CN03 - адреси 7-9 і т.д.
Етап 2. На даному етапі модулі можна об'єднати разом по шині Connect-Bus. Після цього модулі налаштовуються для роботи із зовнішніми датчками, які будуть до них підключені. На цьому ж етапі налаштовуються зв'язки модулів між собою, якщо це передбачається в даній конфігурації.
Етап 3. На даному етапі проводиться настроювання трекера. Налаштування трекера зводиться до налаштування його основних параметрів, а також настроювання внутрішніх датчиків та CAN-датчиків. Кожен CAN-датчик налаштовується для роботи з однією змінною. Всі ці змінні транслюються в шину Connect-Bus підключеними до неї модулями і несуть у собі інформацію, отриману з зовнішніх датчиків. Кожен CAN-датчик трекера налаштовується як окремий I/O елемент.
Описана послідовність є умовною. Системи монітоніторингу, побудовані на базі системи Bitrek Connect можуть включати розлкількість модулів, і у зв'язку з цим послідовність настройки може дещо відрізнятися.
Опис роботи модуля конфігуратора
Усі пристрої, підключені до шини Connect-Bus системи Bitrek Connect, можуть бути налаштовані за допомогою модуля конфігуратора, що підключається до шини (Мал. 9). Для роботи з модулем конфігуратора використовують спеціальне програмне забезпечення – Connect Configurator.
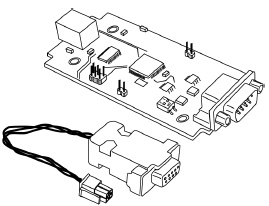
Рис.9. Зовнішній вигляд модуля конфігуратора
Структура команд
Модуль приймає команди конфігурування, сформовані програмою Connect Configurator і, залежно від адресата, транслює їх у шину Connect-Bus або виконує самостійно. Всі модулі системи Bitrek Connect, крім модуля конфігуратора, мають можливість налаштування мережевої адреси. Адреса модуля кофігуратора на шині Connect-Bus – FEh і не підлягає настроюванню. Усі команди, відправлені на цю адресу, сприймаються модулем як власні та виконуються ним. Модуль конфігуратора підтримує такі команди:
getpassport – запросити список паспортів, доступних на шині пристроїв;
clrpassport – стерти список паспортів, доступних на шині пристроїв;
getver – отримати рядок із версією прошивки конфігуратора;
getbusstatus – отримати статус шини Connect-Bus;
cpureset – перезавантажити пристрій.
Формат відповіді на команду getpassport:
PASSPORT: index;addr;model;sw
Де:
index – індекс паспорта – 0-31 (до 32-х паспортів);
addr - адреса пристрою на шині;
model – модель пристрою;
sw - версія прошивки пристрою;
Приклад відповіді:
PASSPORT: 1; 1; RL01; 0180
Формат відповіді на команду clrpassport - <CLRPASSPORT OK>\r
Формат відповіді на команду getver - <S6 CAN CONFIG VER 1.4>\r
Формат відповіді на команду getbusstatus –
<BUS STATUS: STATUS,SPEED;BUSOFFCNT;RXCNT;TXCNT>\r
де:
STATUS – OFF або OK;
SPEED – поточна швидкість шини (0, 125, 250, 500);
BUSOFFCNT – лічильник станів BUS OFF;
RXCNT – лічильник прийнятих пакетів;
TXCNT – лічильник переданих пакетів;
На команду cpureset відповідь відсутня.
Команди надіслані на адресу, яка не співпадає з адресою модуля конфігуратора, транслюються в шину Connect-Bus та виконуються іншими модулями, присутніми в шині.
Модуль конфігуратора аналізує паспорти всіх периферійних модулів на шині. У разі відключення периферійного модуля від шини модуль конфігуратора утримує паспорт протягом 5 секунд після чого видаляє паспорт пристрою, що відключився з пам'яті.
Будь-який периферійний модуль на шині Connect-Bus має свою унікальну (настроювану) адресу. Кожен параметр, що настроюється, має свій номер – ID параметра. Для запиту на значення параметра використовується команда getparam. Для встановлення значення параметра – команда setparam.
Приклад команди запиту для параметра ID 0216:
getparam 0216;
Структура рядка з командою:
$addr;string_cmd_0;string_cmd_1;string_cmd_n;
Де:
$ – долар – ознака початку рядка з командою;
addr – адреса периферійного модуля на шині, якого призначена команда. Завжди передається у HEX-форматі у вигляді 2-х ASCII-кодованих символів;
string_cmd_0 - string_cmd_n – будь-які текстові команди, що підтримуються адресатом (наприклад: getver; cpureset; getparam xxxx;);
Розділювачем між командами завжди виступає символ крапка з комою - ';'
В одному рядку може бути надіслано кілька команд. Розмір буфера для команд терміналу становить 1024 символи. Модулі, які знаходяться на шині, очікують адресовані ним команди, потім розшифровують їх і відправляють відповідь у вигляді:
$addr;answer
Де:
$ - долар - ознака початку рядка із відповіддю;
addr – адреса модуля на шині, від якого отримано відповідь. Завжди передається в форматі HEX у вигляді 2-х ASCII-кодованих символів;
answer – відповідь на команду (структура відповіді залежить від команди та аналогічна до відповіді при конфігуруванні через термінал);
Для доступу до конфігурування периферійного модуля на шині необхідно надіслати йому пароль доступу до терміналу за допомогою стандартної команди TPASS: xxxx;
Приклад відправлення команди getver та getparam 0241 периферійному модулю з адресою 0x07. У модулі встановлено пароль доступу до терміналу 11111;
$07;TPASS: 11111;getver;getparam 0241;
$07;TASK COM TERM: PASSWORD OK
$07;Param ID: 0241 Val: 10
$07;<S6 CAN RELAY VER. 1.8>
Модулі системи не відповідають командам, якщо не введено пароль доступу до конфігурування.
Опис повідомлень, що транслюються в шину Connect-Bus
Кожний пристрій транслює повідомлення в шину Connect-Bus. Ідентифікатор цих повідомлень є PGN (Parameter Group Number) – це номер групи параметрів, який визначає вміст відповідного повідомлення. Один PGN може містити кілька змінних. Кожен окремий пристрій на шині може транслювати в шину кілька PGN.
Кожна змінна, що транслюється пристроєм у шину Connect-Bus, має ряд параметрів:
1. Розрядність (CANsize);
2. Адреса пристрою, що виконує трансляцію змінної в шину (CANAddr);
3. PGN – ідентифікатор повідомлення, яке містить у собі цю змінну. Слід звернути увагу, що один PGN може містити кілька змінних;
4. Стартбіт (BitPos) - стартовий біт змінної;
5. БітВсього (BitNum) - всього біт змінної;
6. Таймаут (Timeout) – таймаут, протягом якого трекер транслюватиме останнє валідне значення цієї змінної. Якщо тайм-аут буде встановлено в 0, то останнє валідне значення транслюватиметься трекером постійно.
Трекер системи Bitrek Connect налаштовується прийом потрібних змінних. Отримуючи змінні з шини, трекер може оперувати цими змінними як звичайними I\O елементами, і в залежності від налаштувань I\O елемента, відправляти отримані значення на сервер (детальніше про налаштування I/O елементів у Додатку 1).
Програмне забезпечення Connect Configurator
Загальний опис
Програмне забезпечення Connect Configurator призначене для формування та надсилання конфігураційних команд модулю конфігуратора. Connect Configurator має зручний інтерфейс та постійно вдосконалюється.
З появою кожного нового периферійного модуля системи Bitrek Connect (або з оновленням прошивки існуючого модуля) виходить новий конфігураційний файл .XML бібліотеки, який необхідний для коректної роботи Connect Configurator з новим або оновленим обладнанням. У цьому файлі описуються всі параметри модуля, що настроюються, а так само змінні, які модуль може передати в шину. Перед початком роботи конфігураційний файл .XML бібліотеки необхідно скопіювати в папку lib, яка знаходиться в кореневій папці програми Connect Configurator.
Для початку роботи з обладнанням необхідно підключити вибрані модулі згідно з представленою в цьому посібнику топології системи. При цьому необхідно забезпечити надійне живлення модулів від джерела 12 або 24 В.
Для коректної роботи модуля конфігуратора та ПЗ Connect Configurator ПК повинен відповідати наступним вимогам:
- Операційна система Windows XP або новіша;
- Програмна платформа NET.Framework 4 або вище;
- ОЗУ 1024 МБ та більше;
- Вільне місце на диску - 50 МБ (з урахуванням зберігання логів);
- Для модуля конфігуратора має бути встановлений пакет драйверів.
Зовнішній вигляд Connect Configurator
На рис.10 показаний зовнішній вигляд вікна програми конфігуратора.
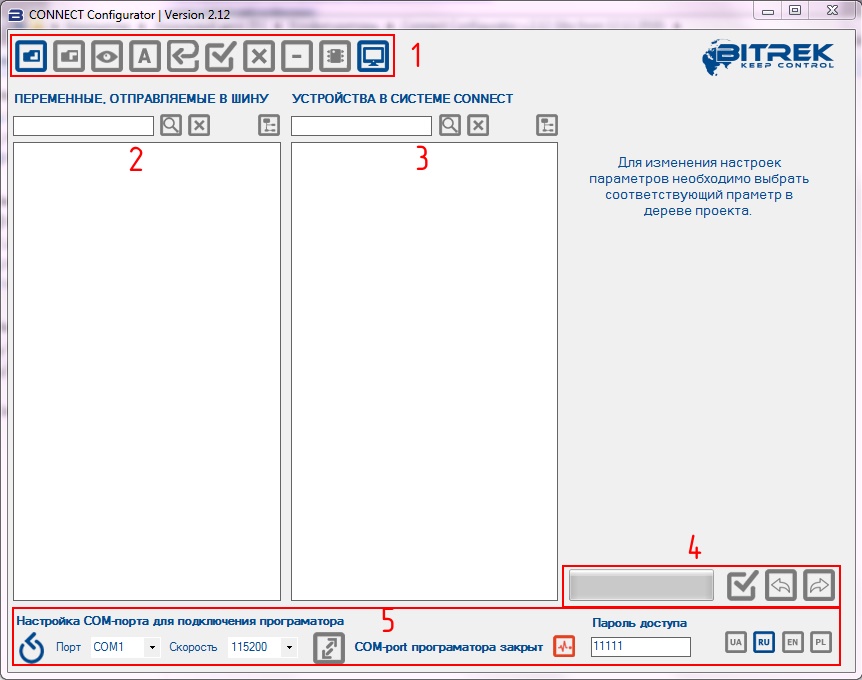
Рис.10. Зовнішній вигляд програми CONNECT Configurator
Умовні позначення:
- Панель інструментів;
- поле для роботи зі змінними, що відправляються в шину Connect-Bus;
- поле для роботи з пристроями, підключеними до шини Connect-Bus;
- статус-бар та відправка команд на пристрої;
- Налаштування COM-порту для підключення програматора.
Панель інструментів

Рис.11. Панель інструментів програми CONNECT Configurator
Умовні позначення:
- відкрити бібліотечний або конфігураційний файл;
- Зберегти поточну конфігурацію у файл;
- сканування мережі з метою пошуку підключених модулів;
- Перемикання режимів роботи конфігуратора між режимами «Адреса» та «Параметр»;
- встановити для всіх параметрів значення за замовчуванням;
- Вибрати всі доступні параметри/скасувати вибір;
- очистити проект;
- Видалити вибраний пристрій із проекту;
- оновити прошивку пристрою;
10. вікно терміналу.
Порядок роботи при налаштуванні системи Connect
Призначення адрес для пристроїв на шині Connect-Bus
Перед початком роботи з пристроями системи Bitrek Connect та складання їх у єдину систему необхідно задати кожному з модулів унікальну адресу на шині Connect-Bus. Для зміни адреси необхідно, після підключення одного пристрою Connect та модуля конфігуратора до шини Connect-Bus, у програмі Connect Configurator вибрати номер COM-порту, який відповідає модулю конфігуратора, встановити швидкість з'єднання рівну 115200, вказати пароль доступу до пристрою (за замовчуванням 11111) та натиснути кнопку «підключитися». Після цього необхідно виконати сканування мережі для виявлення підключених пристроїв. Після успішного сканування у робочому полі програми буде відображено доступний пристрій (Мал.12).
За промовчанням програма Connect Configurator знаходиться в режимі “Адреса”, про що сигналізує піктограма у вигляді літери “А” на панелі інструментів програми. Режим “Адреса” дозволяє задавати або змінювати адреси пристроїв на шині Connect-Bus. Адреси задаються у десятирічній системі зліснення (DEC).
Для встановлення адреси необхідно записати його у відповідному полі, відзначити той пристрій, на який буде відправлено команду на зміну адреси, і відправити команду, натиснувши кнопку «Відправити». Після завершення операції програма видасть повідомлення про успішне встановлення адреси.
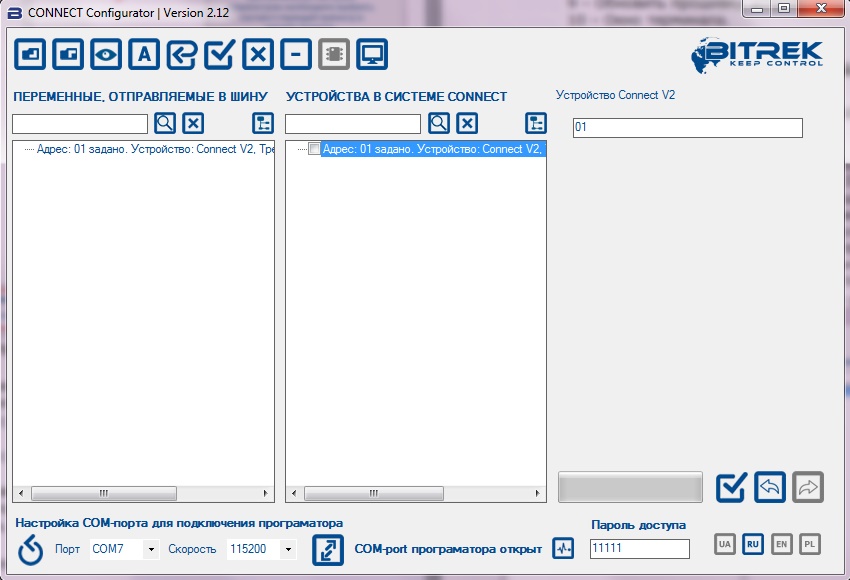
Рис.12. Список пристроїв на шині Connect-Bus
Конфігурування модулів системи
Для налаштування модулів необхідно переключити програму Connect Configurator у режим «Параметр», натиснувши відповідну кнопку на панелі інструментів. Знак у вигляді літери «П» свідчить про те, що програма переключена в режим «Параметр».
По кожному підключеному пристрої в програмі відображається згорнутий за замовчуванням деревоподібний список параметрів та змінних. Ім'я списку містить назву пристрою та його адресу на шині (Мал.13). Для налаштування модуля необхідно скористатись полем «Пристрої в системі Connect». Розгорнувши список, можна побачити доступні для настройки параметри. Список усіх доступних параметрів та їх можливі значення наведено в посібнику користувача кожного окремого модуля.
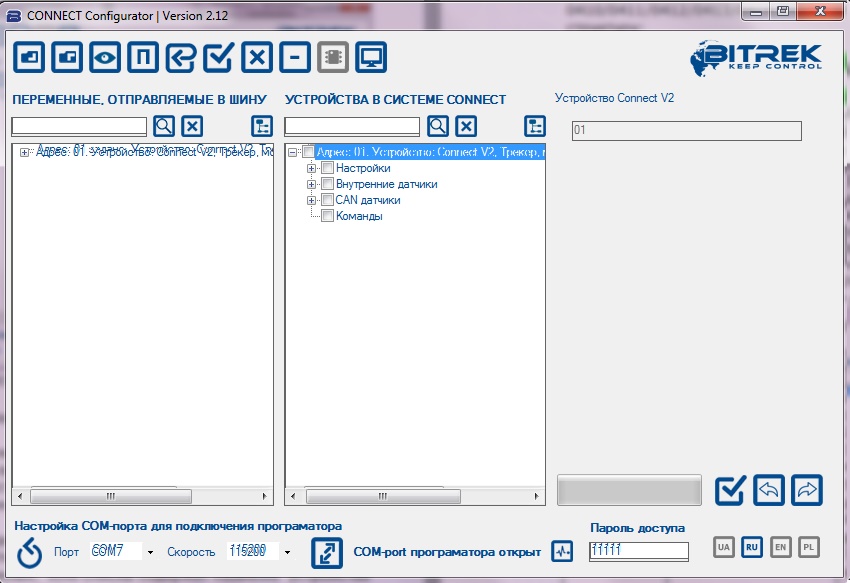
Рис.13. Список параметрів та змінних
Детальний опис конфігурування модулів
Приклад налаштування модуля
Нижче наведено приклад конфігурування модуля CN для роботи з трьома пристроями по шині RS485: 2 датчики рівня палива та 1 зчитувач RFID.
Кожне підключене до модуля CN пристрій має бути попередньо налаштоване. Налаштування зводиться до призначення кожного пристрою на шині RS485 свого адреси мережі. Першому датчику рівня палива надають адресу 1, другому – адресу 2, зчитувачу RFID – адресу 9.
Примітка:
Обмін даними між зчитувачем RFID та модулем CN відбувається згідно з протоколом RCS SOVA.
Далі необхідно провести налаштування самого модуля CN. Відкриваємо деревоподібний список параметрів модуля, натиснувши на символ «+». У списку з'явиться група «Установки. У підгрупі «ДРП RS485» необхідно налаштувати такі параметри: «Адреса ДРП » та «Дозвіл опитування ДРП ». Параметри “Період опитування ДРП ” та “Період передачі ДРП в шину CONNECT-BUS” можна залишити без змін.
Оскільки в системі буде використовуватися 2 датчики рівня палива, то вказуємо у відповідні поля конфігуратора адреси для кожного з датчиків на шині RS485 (у прикладі це 1-а та 2-а адреса) (Рис.14).

Рис.14. Призначення адреси для датчиків рівня палива
Відзначаємо параметри для надсилання та відправляємо команди (Мал.15).
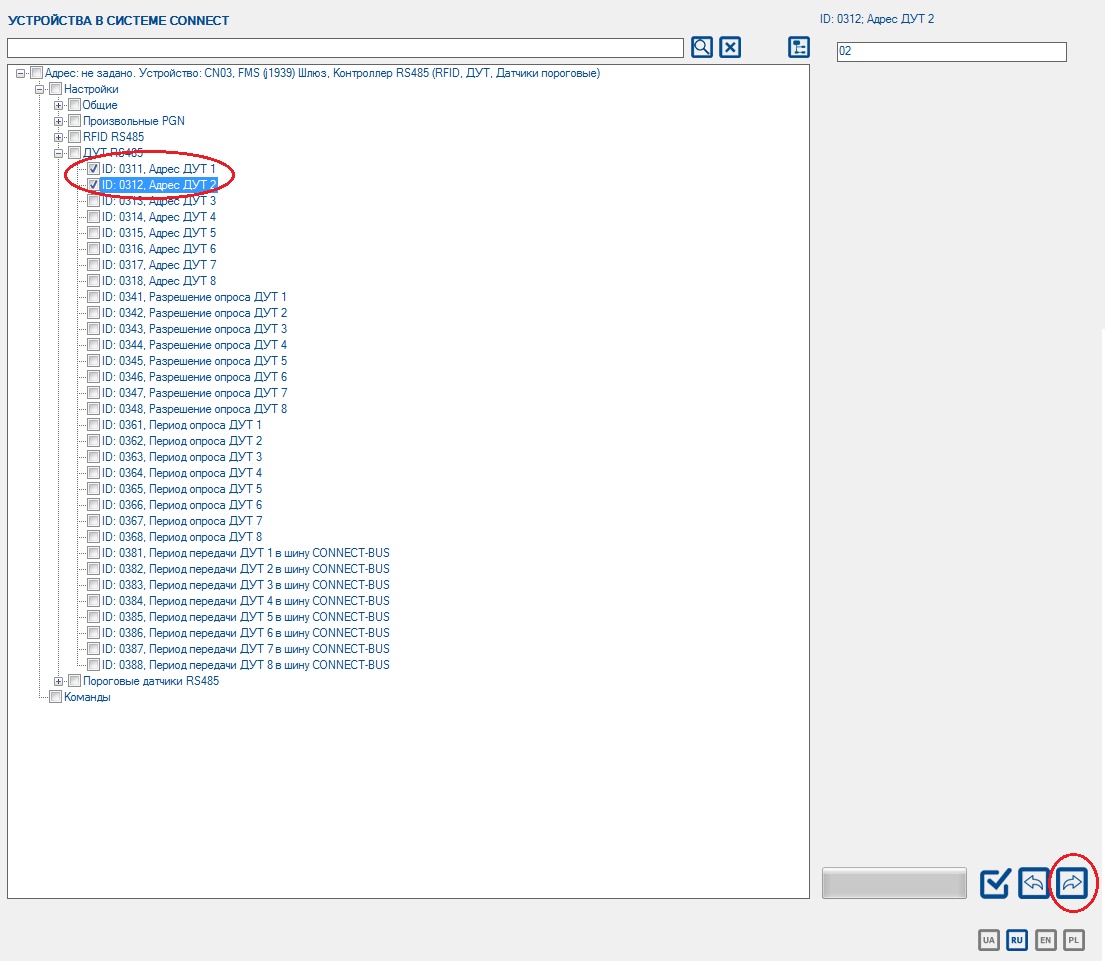
Рис.15. Надсилання модулю зазначених параметрів
Після цього необхідно дозволити опитування датичків рівня палива, відзначити параметри для відправлення та надіслати команди. (Мал.16).
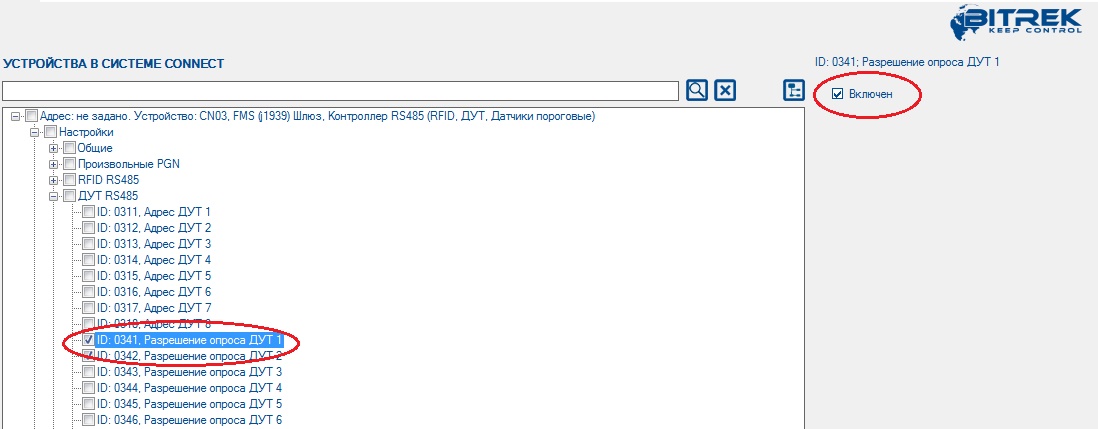
Рис.16. Дозвіл опитування датчиків рівня палива
Налаштування модуля для роботи з зчитувачем RFID проводиться аналогічним чином: вказується адреса зчитувача на шині RS485 (у нашому прикладі це 9-а адреса), дозволяється опитування зчитувача, відзначаються параметри для відправки модулю та відправляється команда (Мал.17).
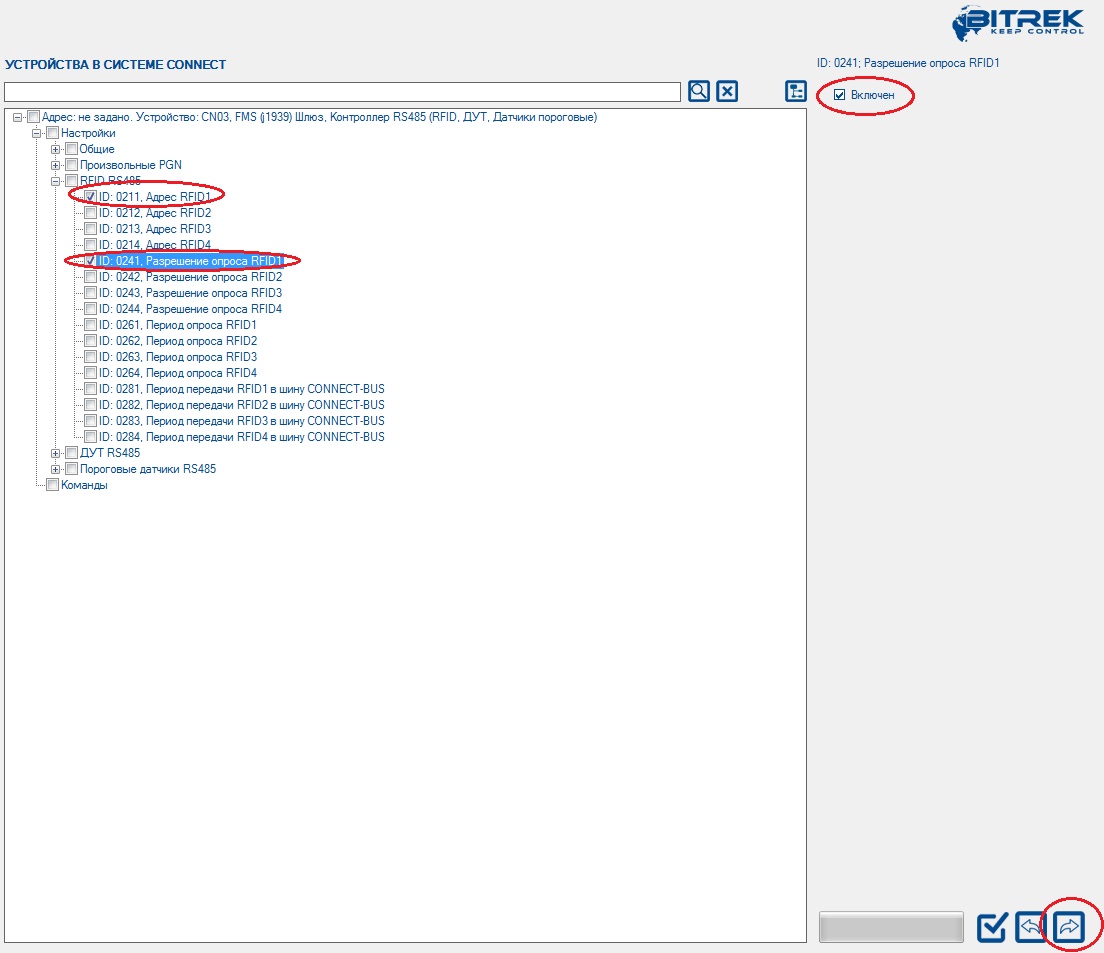
Рис.17. Конфігурування модуля CN для роботи зі зчитувачем RFID
Після цього модуль CN опитуватиме 1, 2 і 9 мережевої адреси на шині RS485. Отримані дані пристроїв модуль буде транслювати в шину CONNECT-BUS.
Конфігурування трекера
Налаштування трекера виконується аналогічним чином. У списку параметрів пристрою необхідно вибрати потрібні параметри, ввести їх у відповідному полі та надіслати команди пристрою. Список усіх доступних для налаштування параметрів знаходиться в посібнику з налаштування та експлуатації до відповідного модуля системи, у т. ч. трекера.
Мінімальний набір необхідних роботи трекера параметрів – це точка доступу GPRS, IP-адреса сервера, порт сервера. Вибираємо потрібні параметри, вказуємо необхідні значення у полі та натискаємо кнопку «Надіслати». Про успішне надсилання параметрів можна судити за станом рядка надсилання команд.
Слід мати на увазі, що для зручності можна налаштувати одразу кілька пристроїв та відправити вибрані у списку параметри одразу кільком пристроям на шині Connect-Bus.
Крім того, для перегляду вже записаних параметрів можна скористатися функцією запиту настройки. Для цього у списку доступних параметрів необхідно відзначити потрібні для перегляду параметри та запросити їх із пристроїв, підключених до шини. Також, коли потрібно запитати з пристроїв Connect всі доступні параметри або надіслати всім пристроям відразу всі параметри - можна скористатися функцією вибору всіх доступних параметрів одночасно. Для цього на панелі інструментів натисніть кнопку «Вибрати всі параметри». Щоб скасувати вибір, необхідно повторно натиснути цю кнопку.
Слід пам'ятати, що у разі вибору одночасно всіх параметрів, їх запит та відправка можуть тривати тривалий час. При цьому, чим більше пристроїв в даний момент підключено до шини Connect-Bus, тим довше буде здійснюватись запит/надсилання команд.
Налаштування трекера на прийом та обробку змінних
Всі змінні, що транслюються модулями в шину Connect-Bus, моможуть бути «захоплені» трекером і передані на сервер як стандартні I/O-елементи (Додаток 1). Для налаштування трекера на прийом та обробку змінних необхідно скористатися списком змінних, що транслюються в шину Connect-Bus та групою налаштувань «CAN-датчики» у списку настройок трекера.
На рис. 18 показані необхідні параметри. Вибраний для прикладу модуль CN може транслювати в шину велику кількість різних змінних. Всі ці змінні розбиті відповідні групи. Для датчиків рівня палива та RFID-зчитувачів є відповідні підгрупи: «ДРП RS485» та «RFID RS485».
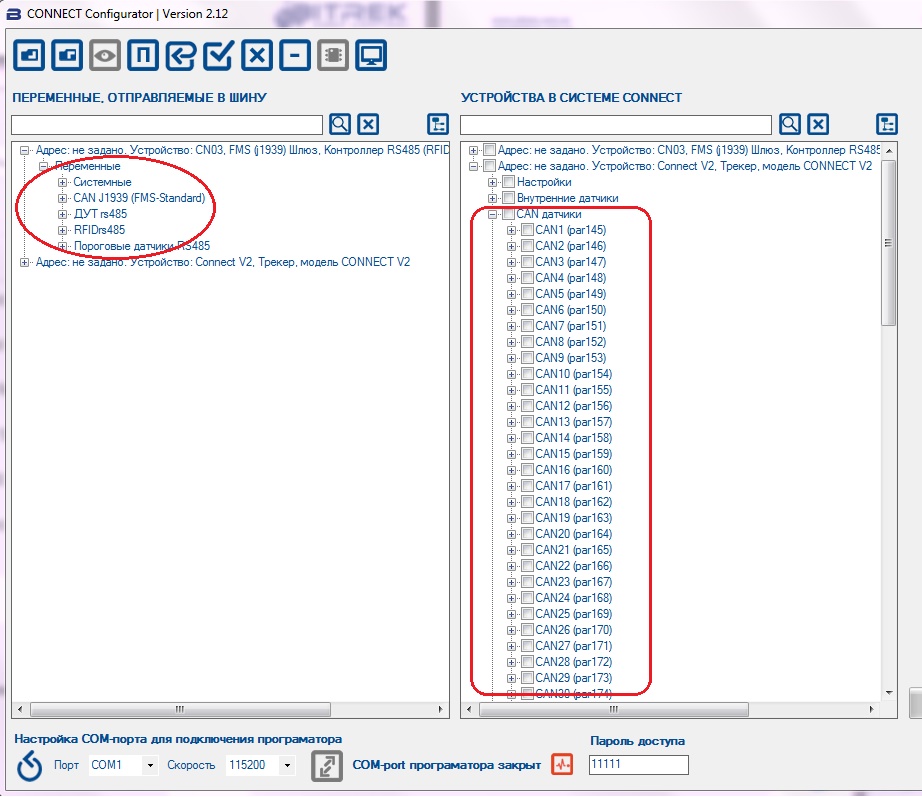
Рис.18. Налаштування змінних для передачі на сервер
У підгрупі змінних ДРП RS485 відображаються наступні змінні, які можуть бути трансльовані в шину: Статус ДРП, Температура ДРП, Паливо ДРП. Для модуля CN максимально допустима кількість датчиків рівня палива, що підключаються, становить 8 шт. Тому всі транслювані змінні налаштовуються окремо для восьми датчиків (Мал.19).
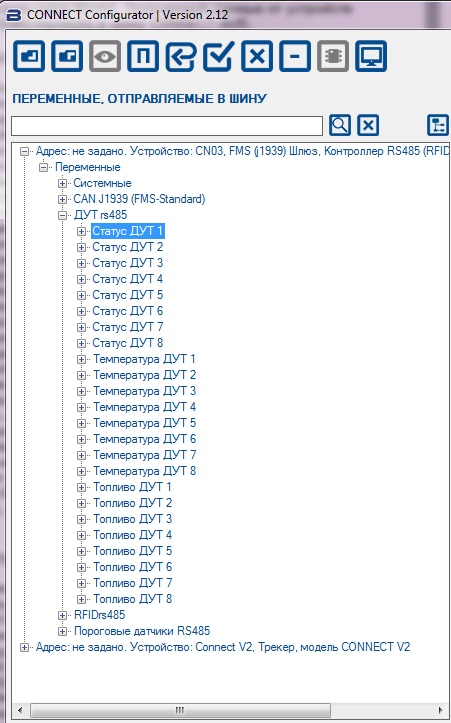
Рис. 19. Список змінних датчиків рівня палива
У підгрупі змінних RFID RS485 доступні для налаштування всього дві змінні: Статус RFID і Номер карти RFID. Усього до модуля може бути підключено до чотирьох зчитувачів RFID. Кожна змінна, що транслюється в шину, має низку параметрів, які доступні для перегляду списку змінних.
Трекер дозволяє передавати на сервер до 100 CAN-датчиків одночасно (CAN1 – CAN100). Кожна така змінна має у свою чергу дві підгрупи налаштувань: “I/O” та “CAN” (Рис.20).
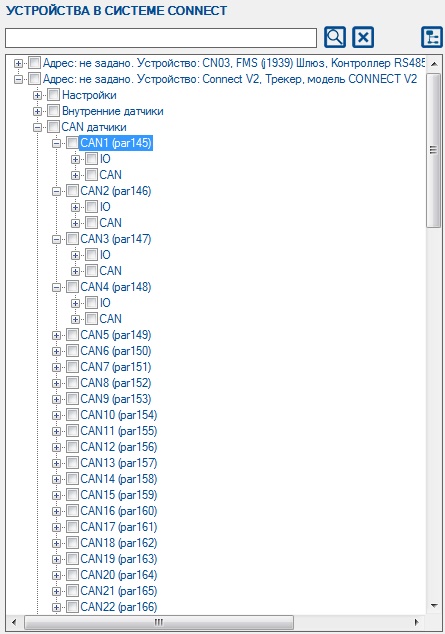
Рис.20. Структура змінних CAN-датчиків трекера
Налаштування змінних, які транслюватимуться трекером на сервер, виконується шляхом їх перетягування з лівої частини вікна конфігуратора на одну зі змінних «CAN-датчики» правою частиною вікна.
Наприклад: У підгрупі змінних «ДРП RS485» модуля CN виділяємо змінну «Паливо ДРП1» і, утримуючи ліву кнопку миші, перетягуємо її в змінну CAN1. Схематично це показано на Мал. 16. Після цього всі необхідні параметри змінної «Паливо ДРП1» будуть автоматично записані до CAN-підгрупи змінної CAN1. При цьому назва змінної CAN1 прийме відповідну назву.

Рис.21. Переміщення змінної «Паливо ДРП1» до змінної CAN1.
Таким чином, параметри CAN-підгрупи будуть заповнені автоматично і наступний крок – це налаштування параметрів I/O підгрупи. Для цього розкриваємо список змінної CAN1 трекера та виділяємо I/O-підгрупу.
Оскільки ми працюємо зі змінною рівня палива, то налаштуємо I/O-елемент у режим моніторингу. Для цього встановлюємо наступні параметри: стан датчика – увімкнено, пріоритет низький, нижня межа – 0, верхня межа – 0, тип події – моніторинг, усереднення – 10. Зовнішній вигляд вікна налаштувань представлений на Мал. 22

Рис.22. Налаштування параметрів I/O-підгрупи
Після зміни параметрів необхідно їх відзначити та надіслати пристроям.
При необхідності всі налаштування можна зберегти в конфігураційний файл і надалі не налаштовувати весь проект наново, а користуватися готовим конфігураційним файлом.
Важливо, щоб мережні адреси пристроїв, збережені у конфігураційному файлі, збігалися з адресами реальних пристроїв на шині Connect-Bus. Якщо використовується налаштування системи за допомогою конфігураційного файлу, необхідно дотримуватися наступної послідовності дій:
- Присвоїти модулям мережеві адреси згідно з файлом конфігурації;
- підключити модулі до шини Connect-Bus;
- Виконати пошук пристроїв на шині;
- переконатися, що всі модулі знайдені та мережні адреси призначені правильно;
- натиснути кнопку «Очистити проект»;
- відкрити конфігураційний файл;
- Вибрати необхідні налаштування та надіслати їх модулям.
За наведеним у цьому посібнику принципом налаштовуються всі модулі системи.
Додаток 1. Налаштування I/O елементів
Кожен датчик трекера є I/O елементом та для налаштування має групу, що складається з 6 параметрів. Наприклад, для налаштування передачі на сервер значення рівня напруги джерела живлення використовується група параметрів ID 0410/0411/0412/0413/0414/0415. Ці параметри мають таку структуру:
0410/0411/0412/0413/041' '4/0415''
Перші 3 цифри (виділені жирним) – номер групи параметрів для налаштування I/O елемента.
Остання цифра (виділена моношрифтом) номер параметра. Для одного I/O елемента існує 6 параметрів (від 0 до 5). Можливі значення цих параметрів представлені у таблиці 1.
Таблиця 1 – Список параметрів I/O елемента
| Номер параметра | Опис | Можливі значення |
|---|---|---|
| 0 | Включення/вимикання I/O елемента | 0 – вимкнено; 1 - включений |
| 1 | Пріоритет I/O елемента при відправленні | 0 - низький; 1 – високий |
| 2 | Верхня межа | (залежить від типу I/O елемента) |
| 3 | Нижня межа | (залежить від типу I/O елемента) |
| 4 | Установка типу події, що генерується | 0 – вхід у діапазон; 1 – вихід з діапазону; 2 – повернення/вихід у/з діапазону; 3 – моніторинг; 4 – моніторинг + вхід у діапазон; 5 – моніторинг + вихід з діапазону; 6 – моніторинг + повернення/вихід в/з діапазону; 7 – генерація події зі зміни вхідної величини на задане значення; значення + моніторинг |
| 5 | Константа усереднення | Від 0 і вище |
Пояснення до таблиці 1:
Параметр 0 – увімкнення/вимкнення передачі I/O елемента на сервер.
Параметр 1 - Пріоритет: низький/високий. Якщо вибрати «Пріоритет: низький», дані датчика будуть надіслані на сервер з наступним пакетом даних. При виборі “Пріоритет: високий” дані будуть надіслані на сервер за першої можливості;
Параметр 2 - Верхня межа – встановлення верхньої межі I/O елемента;
Параметр 3 - Нижня межа – встановлення нижньої межі I/O елемента;
Параметр 4 – Встановлення типу події, що генерується:
0 - Повернення в діапазон.
Якщо заданий певний діапазон значень датчика (діапазон значень визначається наступним чином – нижня межа діапазону записується у відповідний параметр – «Нижня межа», верхня межа – відповідно до параметра «Верхня межа»), то подія буде згенерована в момент, коли фактичне значення датчика зайде у заданий діапазон. В інших випадках подія не буде створена і інформація на сервер не буде передана.
Приклад: Нижній поріг напруги живлення заданий 0, верхній поріг - 10 В (10000 мВ). При зниженні напруги нижче 10 В буде згенерована подія (Рис. 18).
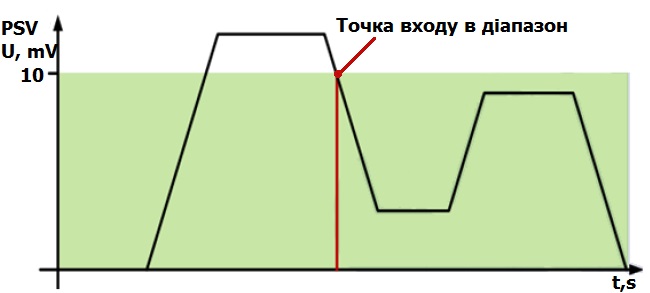 Рис.18. Генерація події щодо повернення в діапазон
1 - Вихід із діапазону.
Подія генеруватиметься в тому випадку, якщо фактичне значення датчика вийде за межі заданого діапазону.
Приклад: Нижній поріг напруги живлення заданий 0, верхній поріг - 10 В (10000 мВ). При підвищенні напруги вище 10 буде згенерована подія (Рис. 19).
Рис.18. Генерація події щодо повернення в діапазон
1 - Вихід із діапазону.
Подія генеруватиметься в тому випадку, якщо фактичне значення датчика вийде за межі заданого діапазону.
Приклад: Нижній поріг напруги живлення заданий 0, верхній поріг - 10 В (10000 мВ). При підвищенні напруги вище 10 буде згенерована подія (Рис. 19).
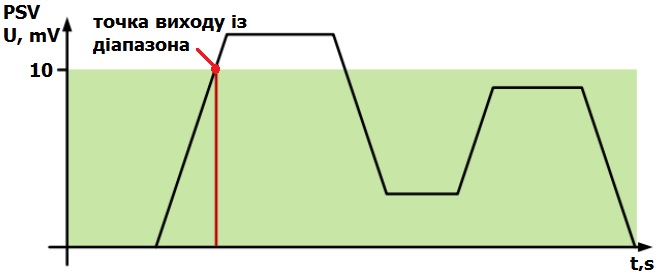 Рис.19. Генерація події щодо виходу їх діапазону
2 - Повернення/вихід в/з діапазону.
Подія буде згенерована щоразу, коли фактичне значення датчика перетинатиме межі заданого діапазону.
Приклад: Нижній поріг напруги живлення заданий 5 (5000 мВ), верхній поріг – 10 (10000 мВ). Код фактична напруга перетинає межі заданого діапазону, генерується подія (Рис. 20).
Рис.19. Генерація події щодо виходу їх діапазону
2 - Повернення/вихід в/з діапазону.
Подія буде згенерована щоразу, коли фактичне значення датчика перетинатиме межі заданого діапазону.
Приклад: Нижній поріг напруги живлення заданий 5 (5000 мВ), верхній поріг – 10 (10000 мВ). Код фактична напруга перетинає межі заданого діапазону, генерується подія (Рис. 20).
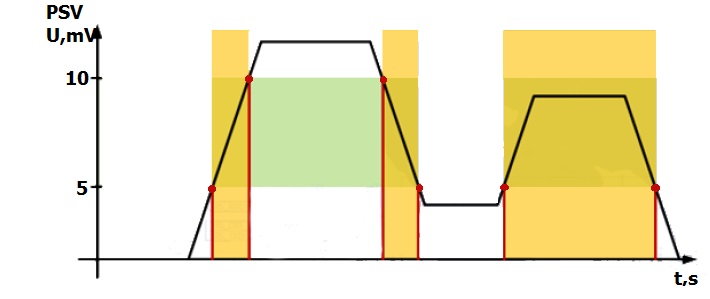 Рис.20. Генерація події щодо повернення/виходу в/з діапазону
3 - Моніторинг.
Рис.20. Генерація події щодо повернення/виходу в/з діапазону
3 - Моніторинг.
При виборі цього режиму дані передаватимуться постійно, події генеруватися не будуть.
4 - Моніторинг + вхід у діапазон. Коли подія входу в діапазон згенеровано, фактичне значення датчика починає передаватися на сервер у режимі моніторингу. 5 - Моніторинг + вихід із діапазону. Коли подія виходу з діапазону буде згенеровано, фактичне значення датчика починає передаватися на сервер у режимі моніторингу. 6 - Моніторинг + повернення/вихід в/з діапазону.
Коли одна з подій буде згенерована, фактичне значення датчика починає передаватися на сервер.
7 - Зміна вхідної величини на задане значення. При зміні вхідної величини на задане значення будь-який бік буде згенеровано подія. Значення величини записується до параметра «Верхня межа». 8 - Моніторинг + зміна вхідної величини на задане значення.
Коли подія згенеровано, фактичне значення датчика передаватиметься на сервер.
Параметр 5 – Константа усереднення - це час, протягом якого I/O елемент повинен знаходитись у певному стані, щоб згенерувалась подія. Вимірюється в мілісекундах (X * 50 мс, тобто при установці значення 10, константа дорівнюватиме 10 * 50 = 500 мс).