РУКОВОДСТВО ПО ОРГАНИЗАЦИИ И НАСТРОЙКЕ СИСТЕМЫ BITREK CONNECT
Термины и определения
CAN (Control Area Network) – последовательный цифровой интерфейс связи шинного типа, соответствующий международному стандарту ISO 11898-1:2003. Шина CAN служит для объединения в единую сеть различных исполнительных электронных устройств и датчиков как в системах промышленной автоматизации, так и в автомобильной промышленности.
FMS – пакеты данных бортовых информационных шин транспортных средств, соответствующие документу FMS-Standard Interface Description. FMS-Standard является открытым стандартом интерфейса FMS, разработанного ведущими мировыми производителями грузовых автомобилей.
J1939 – стандарт коммуникационной и диагностической сети для различных машин. Изначально разрабатывался для грузовиков. Сеть, созданная на основе J1939, в качестве канального уровня использует коммуникационную шину CAN стандарта CAN 2.0b. В настоящее время стандарт J1939 находит широкое применение в сельскохозяйственной технике, автобусах, грузовых автомобилях.
Connect-Bus – телематическая шина транспортного средства, которая служит для объединения в единую сеть всех устройств системы Connect. Физически реализована на основе интерфейса CAN. Протокол обмена информацией по шине Connect-Bus построен на основе протокола J1939.
PGN (Parameter Group Number) – номер группы параметров, определяющий содержимое соответствующего сообщения шины CAN согласно J1939. Термин PGN используется для обозначения сообщений шины CAN.
Переменная, транслируемая в шину Connect-Bus – определенный параметр в сообщении шины Connect-Bus. Каждая переменная имеет ряд параметров, таких как длина данных, тип данных, численное значение.
Протокол – набор соглашений логического уровня, позволяющий осуществлять соединение и обмен данными между двумя и более включенными в сеть устройствами. Эти соглашения задают единообразный способ передачи данных и обработки ошибок.
Модуль системы Connect – входящий в систему Connect модуль, выполняющий определенные функции. Каждый модуль подключен к шине Connect-Bus и обменивается данными с другими модулями.
Назначение системы
Система Bitrek Connect предназначена для удаленного отслеживания местоположения и состояния подвижных объектов в режиме реального времени с использованием различных систем спутникового слежения и передачи данных при помощи мобильной связи. Кроме того, система может принимать, собирать и обрабатывать данные с различного дополнительного оборудования.
Система Bitrek Connect создана для решения сложных комплексных задач. В зависимости от подключенных к системе дополнительных модулей, можно создавать различные конфигурации системы Connect. Таким образом, можно решать задачи для различного типа транспорта:
- трактора
- комбайны
- топливозаправщики
- пассажирский транспорт
- такси
- поезда
- краны
- рефрижераторы
- аграрная спецтехника
- строительная спецтехника
Так же имеется возможность постепенного расширения системы, добавляя к ней новые модули и подключая новые датчики. При этом нет необходимости менять уже существующее оборудование. Кроме того, имеется возможность создания уникальных разработок и доработок модулей, подключаемых к системе под заказ.
Организация системы
В основе организации системы лежит CAN-интерфейс, который позволяет подключить к системе большое количество дополнительных датчиков. Трекер системы Bitrek Connect не имеет привычного набора цифровых интерфейсов, дискретных и аналоговых входов. Вместо этого он оснащен одним CAN-интерфейсом (далее – Connect-Bus) и может быть настроен на прием информации с различных дополнительных модулей системы. Модули, в свою очередь, выполнены в виде отдельных устройств, подключаемых к шине Connect-Bus и могут в зависимости от своего назначения обрабатывать данные с различных датчиков и передавать данные в шину.
Информация, передаваемая модулями в шину системы, может быть использована не только трекером для передачи ее на сервер, но и другими устройствами в системе Connect. К примеру, модуль RL02 (модуль для управления выгрузкой комбайна) может напрямую взаимодействовать с модулем BL01 (модуль для идентификации «Свой-Чужой»).
Трекер системы Bitrek Connect, так же как и модули системы, может передавать в Connect-Bus различную информацию: координаты, скорость, пробег и т.д. Эта информация, в свою очередь, может быть использована другими устройствами в системе. Кроме того, с помощью отдельного модуля можно напрямую подключиться к CAN-шине транспортного средства по протоколу FMS.
ВАЖНО: Не дупускается прямое подключение шины CAN транспортного средства к телематической шине Connect-Bus. Если такое подключение необходимо, оно производится с помощью специального модуля – шлюза CN01 или CN03.
Топология системы
Для передачи данных в шине Connect-Bus используется дифференциальная линия связи – витая пара, сигналы в которой передаются в дифференциальном режиме. Линии связи называются CAN-High и CAN-Low (далее – CAN-H и CAN-L) и могут быть подключены непосредственно к устройствам.
Система Bitrek Connect, созданная на базе модулей поддерживающих шину Connect-Bus, является одноранговой сетью, а это означает, что любой модуль подключенный к шине может получить независимый доступ к ней и любое сообщение может быть послано одному или нескольким модулям.
Для корректной работы системы необходимо на первом и последнем модулях, подключенных к шине Connect-Bus, устанавливать согласующие резисторы номиналом 120 Ом между линиями CAN-H и CAN-L. Пример аппаратной реализации системы показан на рис. 1
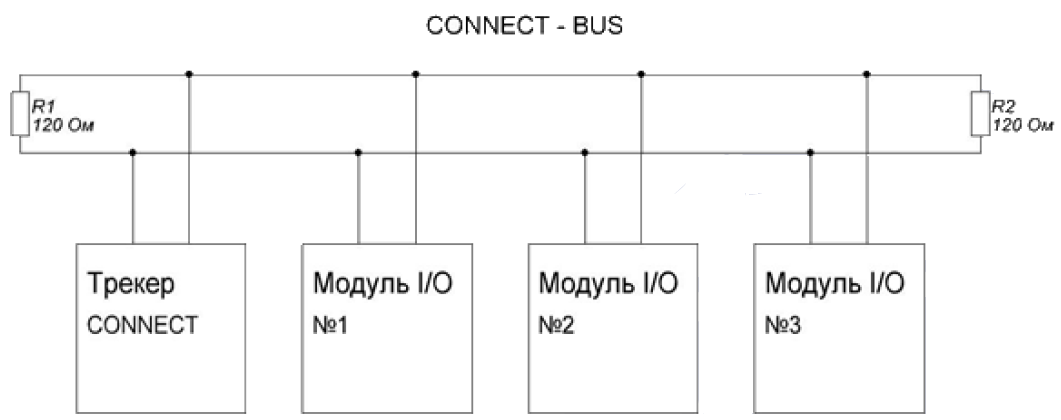
Рис.1 Топология шины Connect-Bus
Для удобства сборки системы Bitrek Connect согласующие резисторы уже установлены на платах большинства модулей системы. Каждый резистор, установленный на плате модуля, может быть либо подключен к шине CAN, либо не задействован. Для включения согласующего резистора нужно установить джампер (перемычку) в разъем, расположенный на плате модуля, и подписанный как «120Е».
Примечание: На плате трекера системы Connect такой резистор отсутствует.
Если существует необходимость подключить согласующий резистор в то место шины Connect Bus, в котором установлен модуль, не имеющий встроенного резистора, можно использовать специальный разветвитель шины Connect-Bus имеющий такой согласующий резистор.
Разветвитель шины Connect-Bus представляет собой коннектор, оснащенный четырьмя равнозначными разъемами Connect-Bus. Эти разветвители используются для построения телематической шины системы Bitrek Connect, и служат для параллельного подключения модулей системы с целью объединения их в единую шину. Разветвители делятся на два вида: красные (со встроенным согласующим резистором) и синие (без согласующего резистора).

Рис.2. Внешний вид разветвителей шины Connect-Bus
Данные разветвители оснащены четырьмя стандартными разъемами шины Connect-Bus. Стандартный разъем Connect-Bus пердставляет собой 4-pin Micro Fit разъем, в который выведены линии питания модулей и сигнальные линии CAN-H и CAN-L. Цоколевка разъема указана ра рисунке 3.
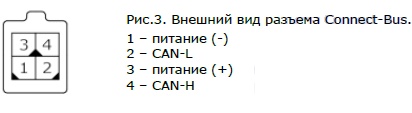
Такими же стандартными разъемами оснащено большинство модулей системы Connect. Модули для наружного монтажа (например, модуль GS01 или BL01) не имеют такого разъема. Вместо него модули имеют на плате винтовые зажимы для подключения кабеля. Так же существуют модули, которые уже оснащены кабелем и не имеют стандартного разъема (пример – модуль MF01). В таком случае выполняя монтаж нужно самостоятельно установить разъем Connect- Bus на кабель после монтажа оборудования и прокладки кабеля. Для установки разъема нужно воспользоваться специальным инструментом – обжимкой для контактов Micro-Fit. При монтаже каждый контакт разъема отдельно обжимается на жилах, после чего контакты вставляются в разъем.
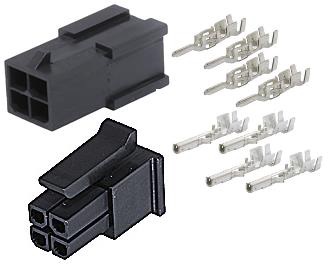
Рис.4. Внешний вид разъемов и контактов Micro-Fit
Для монтажа шины Connect-Bus можно использовать многожильный кабель сечением 0.35 мм2 с витыми жилами.
Для соединения элементов шины Connect-Bus между собой (например, соединение «модуль – модуль» или «модуль – разветвитель») используются кабели CAN-CAN – кабель, состоящий из четырех отдельных проводов, которые с двух сторон оснащены разъемами Connect-Bus.

Рис.5. Внешний вид кабеля CAN-CAN.
Описание проводов:
- Желтый – питание (+)
- Черный – питание (-)
- Белый – CAN-H
- Синий – CAN-L
Длина такого кабеля составляет 10-20 см. Использовать его можно в тех случаях, когда соединямые элементы системы находятся рядом друг с другом (например, при монтаже оборудования под панелью в салоне транспортного средства, либо в отдельном боксе. Если есть необходисмость в более длинном кабеле – он прокладывается отдельно, затем на его концы устанавливаются разъемы Micro-Fit.
Питание в систему подается с помощью специального кабеля питания. Кабель питания оснащен одним стандартным разъемом Connect-Bus и имеет два провода для подведения питания к системе.

Рис.6. Внешний вид кабеля питания.
Описание проводов:
- Желтый – питание (+)
- Черный – питание (-)
Колличество модулей системы Connect, их тип, а также зона их размещения определяют нужное колличество и виды соеденительных элементов системы. Для наглядности ниже описан пример подбора комплектации.
Пример: создать шину Connect-Bus, в составе которой будет трекер BI 810 Connect, модуль EX02 и модуль BL01. Трекер и модуль EX02 устанавливается под передней панелью транспортного средства, а модуль BL01 - в задней части транспортного средства. Для решения такой задачи нужно:
- Красный разветвитель – 1 шт
- Кабель питания – 1 шт
К красному разветвителю подключается трекер, модуль EX02, кабель питания. Остается один свободный разъем в разветвителе – в него подключается модуль конфигуратора для настройки системы. Оставшийся свободный разъем Connect-Bus на модуле EX02 используется для подключения модуля BL01, для подключения которого необходимо отдельно приобрести кабель и разъемы Micro-Fit с контактами. Установка разъемов осуществлятся после прокладки кабеля.
При этом для согласования шины Connect-Bus необходимо на плате модуля EX02 отключить согласующий резистор (снять джампер с разъема на плате), а в модуле BL01 – подключить согласующий резистор (установить джампер). Таким образом будет сформирована шина Connect-Bus, самая длинная часть ее будет связвать между собой модули, установленные в кабине под панелью - с одной стороны, и модуль BL01, установленный на задней стенке транспортного средства – с другой стороны. С обеих сторон длинная линия шины будет согласована резисторами: со стороны кабины резистор установлен в красном разветвителе, со стороны задней стенки транспортного средства – в модуле BL01.
ВАЖНО! Не допускается подключение в шину Connect-Bus более двух согласующий резисторов. Результирующее сопротивление между CAN-H и CAN-L составляет 60 Ом.
Настройка системы Bitrek Connect
Общее описание периферийных модулей Bitrek Connect
Периферийные модули системы Bitrek Connect выполнены в виде отдельных устройств, подключаемых к шине Connect-Bus. В свою очередь модули подразделяются на две версии: первой версии (v01) и второй версии (v02). Функционально они ничем не отличаются, однако существует различие в их исполнении и способе подключения.
Внешний вид модулей v01 и v02 показан на рисунках 7 и 8.

Рис.7. Внешний вид модуля v01

Рис.8. Внешний вид модуля v02
Модули Bitrek Connect v01 оборудованы одним четырёхконтактным разъёмом шины Connect-Bus и не оснащены согласующим резистором. Для построения шины Connect-Bus с использованием данных модулей в любом случае нужно использовать разветвители.
Модули Bitrek Connect v02 оборудованы двумя равнозначными четырёхконтактными разъёмами шины Connect-Bus и согласующим резистором, уснановленным на плате модуля. Включение данного резистора осуществляется установкой перемычки (джампера) в разъем на плате, подписанный «120Е».
Последовательность настройки Bitrek Connect. Взаимодействие трекера и периферийных модулей
Каждый модуль системы Bitrek Connect имеет своё отдельное руководство . В таком руководстве описаны технические характеристики модулей, порядок их введения в эксплуатацию, назначение выводов и вся необходимая техническая информация.
Каждый отдельный модуль системы имеет список настраиваемых параметров (каждый параметр имеет свой номер – ID параметра) и список переменных, которые он транслирует в шину Connect-Bus. Переменные несут в себе информацию, полученную с датчиков, которые подключены к периферийным модулям системы Bitrek Connect. Каждый модуль транслирует эти переменные в шину. Трекер системы, который в свою очередь подключен к шине, может быть настроен на прием и обработку этих переменных. Кроме переменных, которые содержат информацию полученную с датчиков, каждый модуль транслирует в шину системные переменные: аппаратная версия модуля, версия ПО, счетчик перезагрузок модуля и счетчик времени работы модуля с момента перезагрузки.
Согласно структуре организации системы, существует условная последовательность ее настройки, которая делится на 3 этапа:
Этап 1. Настройка сетевых адресов модулей. На данном этапе каждому модулю отдельно назначается свой уникальный сетевой адрес на шине Connect-Bus. При настройке сетевых адресов важно производить настройку адреса каждому модулю по отдельности, не объединяя их вместе, чтоб избежать возможных конфликтов адресов. Полезный совет: Для удобства настройки и удаленного обслуживания системы можно заранее опеределить диапазоны сетевых адресов для каждого типа модуля. Например, модуль RF02 может занимать сетевые адреса 2-3, модуль CN03 – адреса 7-9 и т.д.
Этап 2. На данном этапе модули можно объединить вместе по шине Connect-Bus. После этого модули настраиваются для работы c внешними датчками, которые будут к ним подключены. На этом же этапе настраиваются связи модулей между собой, если это пердполагается в данной конфигурации.
Этап 3. На данном этапе производится настройка трекера. Настройка трекера сводится к настройке его основных параметров, а также настройке внутренних датчиков и CAN-датчиков. Каждый CAN- датчик настраивается для работы с одной переменной. Все эти переменные транслируются в шину Connect-Bus подключенными к ней модулями и несут в себе информацию, полученнуюб с внешних датчиков. Каждый CAN-датчик трекера настраивается как отдельный I/O элемент.
Описанная выше последовательность является условной. Системы монитониторинга, построенные на базе системы Bitrek Connect могут включать в себя различное колличество модулей, и в связи с этим последовательность настройки может несколько отличатся.
Описание работы модуля конфигуратора
Все устройства, подключенные к шине Connect-Bus системы Bitrek Connect, могут быть настроены с помощью модуля конфигуратора, подключаемого к шине (Рис.9). Для работы с модулем конфигуратора используется специальное программное обеспечение – Connect Configurator.
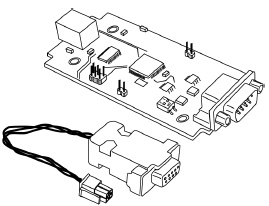
Рис.9. Внешний вид модуля конфигуратора
Структура команд
Модуль принимает команды конфигурирования сформированные программой Connect Configurator и, в зависимости от адресата, транслирует их в шину Connect-Bus или исполняет самостоятельно. Все модули системы Bitrek Connect, кроме модкля конфигуратора, имеют возможность настройки сетевого адреса. Адрес модлуля кофигуратора на шине Connect-Bus – FEh и не подлежит настройке. Все команды, отправленные на этот адрес, воспринимаются модулем как собственные и исполняются им. Модуль конфигуратора поддерживает следующие команды:
getpassport – запросить список паспортов доступных на шине устройств;
clrpassport – стереть список паспортов доступных на шине устройств;
getver – получить строку с версией прошивки конфигуратора;
getbusstatus – получить статус шины Connect-Bus;
cpureset – перезагрузить устройство.
Формат ответа на команду getpassport:
PASSPORT: index;addr;model;sw
Где:
index – индекс паспорта — 0-31 (до 32-х паспортов);
addr – адрес устройства на шине;
model – модель устройства;
sw – версия прошивки устройства;
Пример ответа:
PASSPORT: 1;1;RL01;0180
Формат ответа на команду clrpassport - <CLRPASSPORT OK>\r
Формат ответа на команду getver - <S6 CAN CONFIG VER 1.4>\r
Формат ответа на команду getbusstatus –
<BUS STATUS: STATUS,SPEED;BUSOFFCNT;RXCNT;TXCNT>\r
где:
STATUS - OFF или OK;
SPEED - текущая скорость шины (0, 125, 250, 500);
BUSOFFCNT - счётчик состояний BUS OFF;
RXCNT - счётчик принятых пакетов;
TXCNT - счётчик переданных пакетов;
На команду cpureset ответ отсутствует.
Команды отправленные на адрес, который не совпадает с адресом модуля конфигуратора, транслируются в шину Connect-Bus и исполняются другими модулями, присутствующими в шине.
Модуль конфигуратора анализирует паспорта всех периферийных модулей на шине. В случае отключения периферийного модуля от шины модуль конфигуратора удерживает паспорт в течение 5 секунд после чего удаляет паспорт отключившегося устройства из памяти.
Любой периферийный модуль на шине Connect-Bus имеет свой уникальный (настраиваемый) адрес. Каждый настраиваемый параметр имеет свой номер – ID параметра. Для запроса значения параметра используется команда getparam. Для установки значения параметра – команда setparam.
Пример команды запроса параметра ID 0216:
getparam 0216;
Структура строки с командой следующая:
$addr;string_cmd_0;string_cmd_1;string_cmd_n;
Где:
$ - доллар - признак начала строки с командой;
addr – адрес периферийного модуля на шине, для которого предназначена команда. Всегда передаётся в HEX-формате в виде 2-х ASCII-кодированных символов;
string_cmd_0 - string_cmd_n – любые текстовые команды, поддерживаемые адресатом (например: getver; cpureset; getparam xxxx;);
Разделителем между командами всегда выступает символ точка с запятой - ';'
В одной строке может быть отправлено несколько команд. Размер буфера для команд из терминала составляет 1024 символа. Модули которые находятся на шине, ожидают адресованные им команды, затем расшифровывают их и отправляют ответ в виде:
$addr;answer
Где:
$ - доллар - признак начала строки с ответом;
addr – адрес модуля на шине, от которого получен ответ. Всегда передаётся в HEX формате в виде 2-х ASCII-кодированных символов;
answer – ответ на команду (структура ответа зависит от команды и аналогична ответу при конфигурировании через терминал);
Для доступа к конфигурированию периферийного модуля на шине необходимо отправить ему пароль доступа к терминалу с помощью стандартной команды TPASS: xxxx;
Пример отправки команды getver и getparam 0241 периферийному модулю с адресом 0x07. В модуле установлен пароль доступа к терминалу 11111;
$07;TPASS: 11111;getver;getparam 0241;
$07;TASK COM TERM: PASSWORD OK
$07;Param ID: 0241 Val: 10
$07;<S6 CAN RELAY VER. 1.8>
Модули системы не отвечают на команды, если не введён пароль доступа к конфигурированию.
Описание сообщений, транслируемых в шину Connect-Bus
Каждое устройство выполняет трансляцию сообщений в шину Connect-Bus. Идентификатором этих сообщений является PGN (Parameter Group Number) – это номер группы параметров, определяющий содержимое соответствующего сообщения. Один PGN может содержать в себе несколько переменных. При этом каждое отдельное устройство на шине может транслировать в шину несколько PGN.
Каждая переменная, транслируемая устройством в шину Connect-Bus, имеет ряд параметров:
1. Разрядность (CANsize);
2. Адрес устройства, выполняющего трансляцию переменной в шину (CANAddr);
3. PGN – идентификатор сообщения, которое содержит в себе данную переменную. Следует обратить внимание на то, что один PGN может содержать в себе несколько переменных;
4. СтартБит (BitPos) – стартовый бит переменной;
5. БитВсего (BitNum) – всего бит переменной;
6. Таймаут (Timeout) – таймаут, в течение которого трекер будет транслировать последнее валидное значение данной переменной. Если таймаут будет установлен в 0, то последнее валидное значение будет транслироваться трекером постоянно.
Трекер системы Bitrek Connect настраивается на прием нужных переменных. Получая переменные из шины, трекер может оперировать этими переменными как обычными I\O элементами, и в зависимости от настроек I\O элемента, отправлять полученные значения на сервер (подробнее о настройке I/O элементов в Дополнении 1).
Программное обеспечение Connect Configurator
Общее описание
Программное обеспечение Connect Configurator предназначено для формирования и отправки конфигурационных команд модулю конфигуратора. Connect Configurator имеет удобный интерфейс и постоянно совершенствуется.
С появлением каждого нового периферийного модуля системы Bitrek Connect (или с обновлением прошивки существующего модуля) выходит новый конфигурационный .XML файл библиотеки, который необходим для корректной работы Connect Configurator с новым или обновленным оборудованием. В этом файле описываются все настраиваемые параметры модуля, а так же переменные, которые модуль может передать в шину. Перед началом работы конфигурационный .XML файл библиотеки необходимо скопировать в папку lib, которая находится в корневой папке программы Connect Configurator.
Для начала работы с оборудованием необходимо подключить выбранные модули согласно представленной в данном руководстве топологии системы. При этом необходимо обеспечить надежное питание модулей от источника 12 В или 24 В.
Для корректной работы модуля конфигуратора и ПО Connect Configurator ПК должен соответствовать следующим требованиям:
- Операционная система Windows XP или новее;
- Программная платформа NET.Framework 4 или выше;
- ОЗУ 1024 МБ и более;
- Свободное место на диске – 50 МБ (с учетом хранения логов);
- Для модуля конфигуратора должен быть установлен пакет драйверов.
Внешний вид Connect Configurator
На Рис.10 показан внешний вид окна программы конфигуратора.
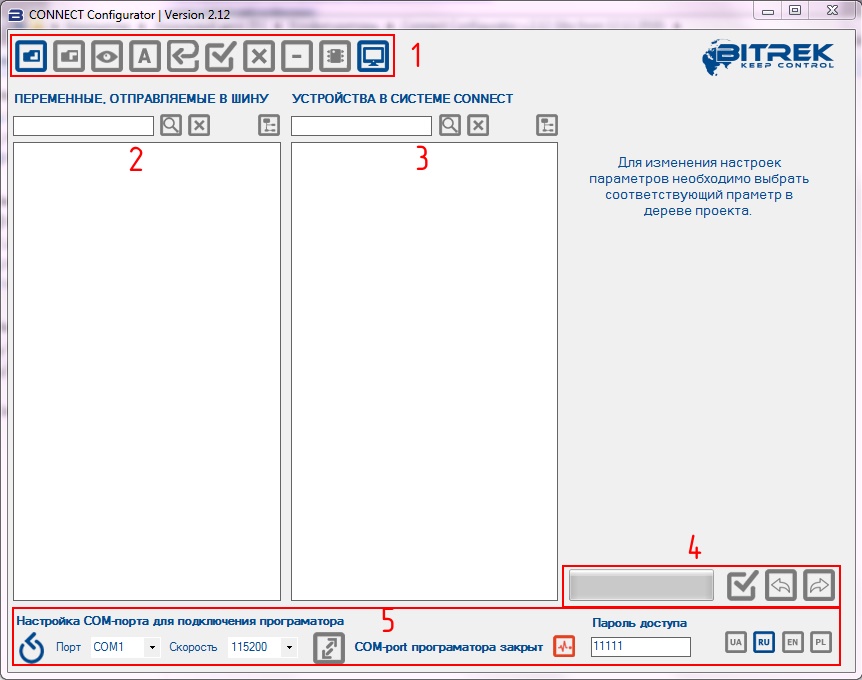
Рис.10. Внешний вид программы CONNECT Configurator
Условные обозначения:
- Панель инструментов;
- Поле для работы с переменными, отправляемыми в шину Connect-Bus;
- Поле для работы с устройствами, подключенными к шине Connect-Bus;
- Статус-бар и отправка команд на устройства;
- Настройки COM-порта для подключения программатора.
Панель инструментов

Рис.11. Панель инструменов программы CONNECT Configurator
Условные обозначения:
- Открыть библиотечный или конфигурационный файл;
- Сохранить текущую конфигурацию в файл;
- Сканирование сети с целью поиска подключенных модулей;
- Переключение режимов работы конфигуратора между режимами «Адрес» и «Параметр»;
- Установить для всех параметров значения по умолчанию;
- Выбрать все доступные параметры/отменить выбор;
- Очистить проект;
- Удалить выбранное устройство из проекта;
- Обновить прошивку устройства;
- Окно терминала.
Порядок работы при настройке системы Connect
Назначение адресов для устройств на шине Connect-Bus
Перед началом работы с устройствами системы Bitrek Connect и сборки их в единую систему необходимо задать каждому из модулей уникальный адрес на шине Connect-Bus. Для смены адреса необходимо, после подключения одного устройства Connect и модуля конфигуратора к шине Connect-Bus, в программе Connect Configurator выбрать номер COM-порта, который соответствует модулю конфигуратора, установить скорость соединения равную 115200, указать пароль доступа к устройству (по умолчанию 11111) и нажать кнопку «подключиться». После этого необходимо выполнить сканирование сети для выявления подключенных в данный момент устройств. После успешного сканирования в рабочем поле программы будет отображено доступное устройство (Рис.12).
По умолчанию программа Connect Configurator находится в режиме «Адрес», о чём сигнализирует пиктограмма в виде буквы «А» на панели инструменов программы. Режим «Адрес» позволяет задавать или изменять адреса устройств на шине Connect-Bus. Адреса задаются в десятиричной системе исчесления (DEC).
Для установки адреса необходимо записать его в соответствующем поле, отметить то устройство, на которое будет отправлена команда на смену адреса, и отправить команду, нажав кнопку «Отправить». По завершению операции программа выдаст сообщение об успешной установке адреса.
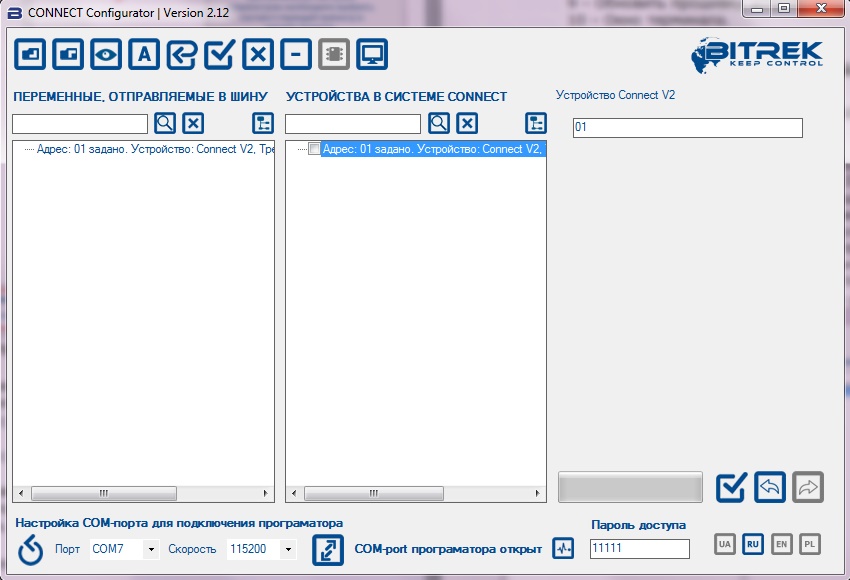
Рис.12. Список устройств на шине Connect-Bus
Конфигурирование модулей системы
Для настройки модулей необходимо переключить программу Connect Configurator в режим «Параметр» нажав соответсвующую кнопку на панели инструментов. Пиктограмма в виде буквы «П» свидетельствует о том, что программа переключена в режим «Параметр».
По каждому подключенному устройству в программе отображается свернутый по умолчанию древовидный список параметров и переменных. Имя списка содержит название устройства и его адрес на шине (Рис.13). Для настройки модуля необходимо воспользоваться полем «Устройства в системе Connect». Развернув список можно увидеть доступные для настройки параметры. Список всех доступных параметров и их возможные значения приведены в руководстве пользователя по каждому отдельному модулю.
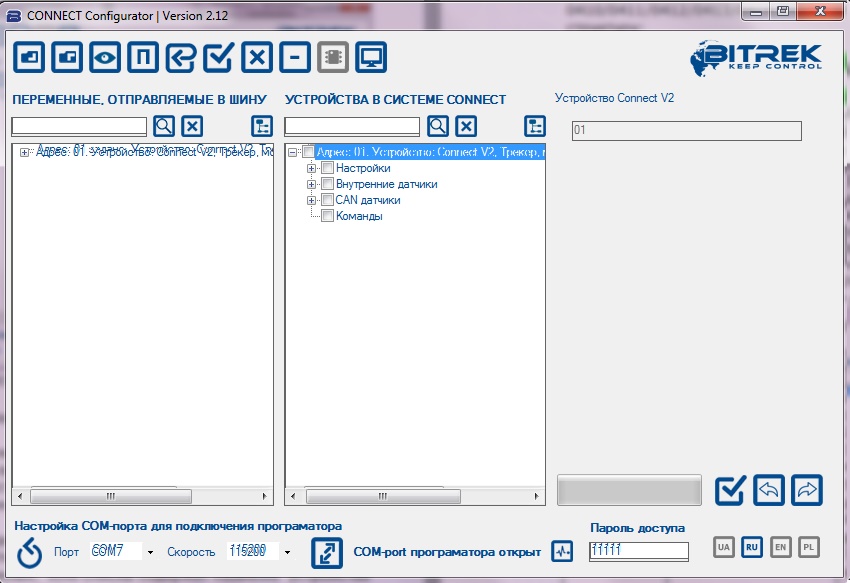
Рис.13. Список параметров и переменных
Подробное описание конфигурирования модулей
Пример настройки модуля
Ниже приведён пример конфигурирования модуля CN для работы с тремя устройствами по шине RS485: 2 датчика уровня топлива и 1 считываетель RFID.
Каждое подключенное к модулю CN устройство должно быть предварительно настроено. Настройка сводится к назначению каждому устройству на шине RS485 своего сетевого адреса. Первому датчику уровня топлива присваиваем адрес 1, второму – адрес 2, считывателю RFID – адрес 9.
Примечание:
Обмен данными между считывателем RFID и модулем CN происходит согласно протоколу RCS SOVA.
Далее необходимо провести настройку самого модуля CN. Открываем древовидный список параметров модуля нажатием на символ «+». В списке отобразится группа «Настройки. В подгруппе «ДУТ RS485» необходимо настроить следующие параметры: «Адрес ДУТ» и «Разрешение опроса ДУТ». Параметры «Период опроса ДУТ» и «Период передачи ДУТ в шину CONNECT-BUS» можно оставить без изменений.
Поскольку в системе будет использоваться 2 датчика уровня топлива, то указываем в соответствующие поля конфигуратора адреса для каждого из датчиков на шине RS485 (в примере это 1-й и 2-й адреса) (Рис.14).

Рис.14. Назначение адреса для датчиков уровня топлива
Отмечаем параметры для отправки и отправляем команды(Рис.15).
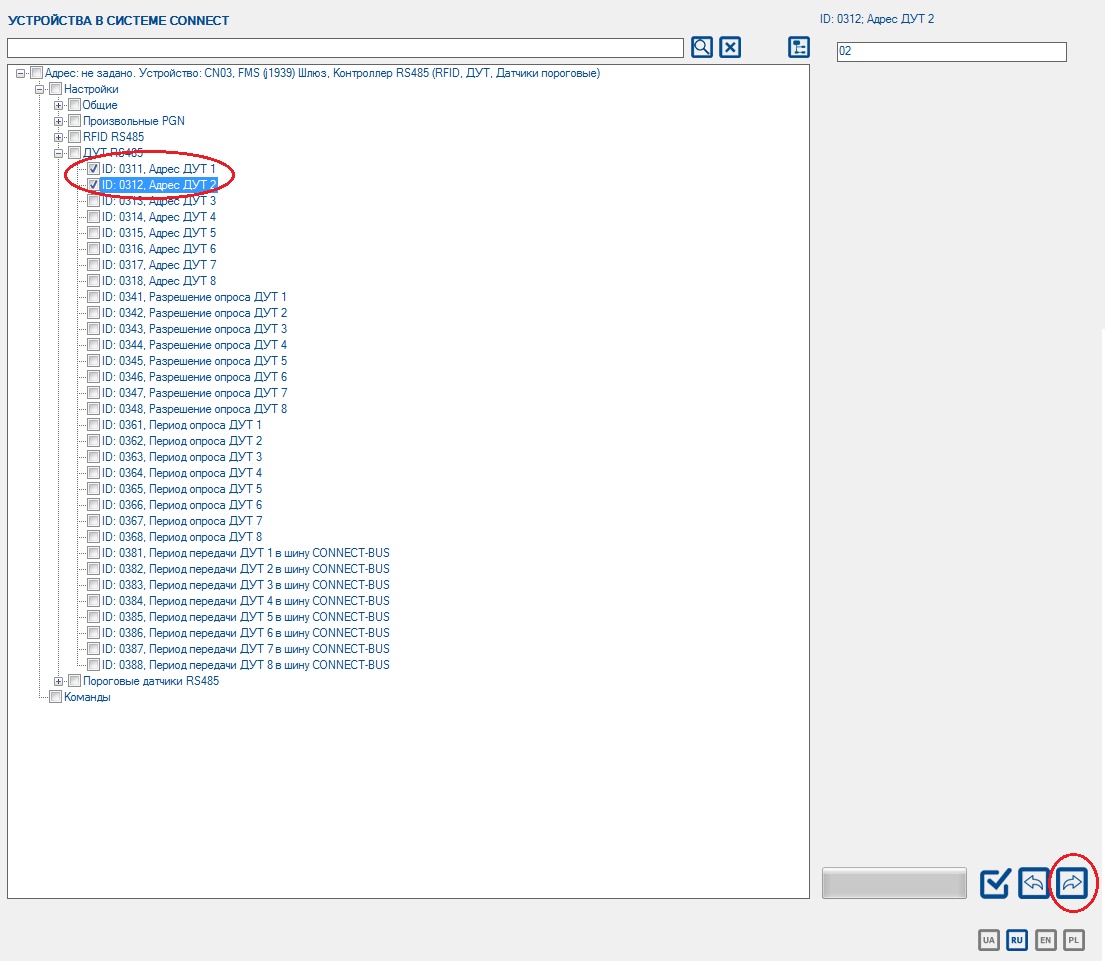
Рис.15. Отправка модулю отмеченных параметров
После этого необходимо разрешить опрос датичков уровня топлива, отметить параметры для отправки и отправить команды.(Рис.16).
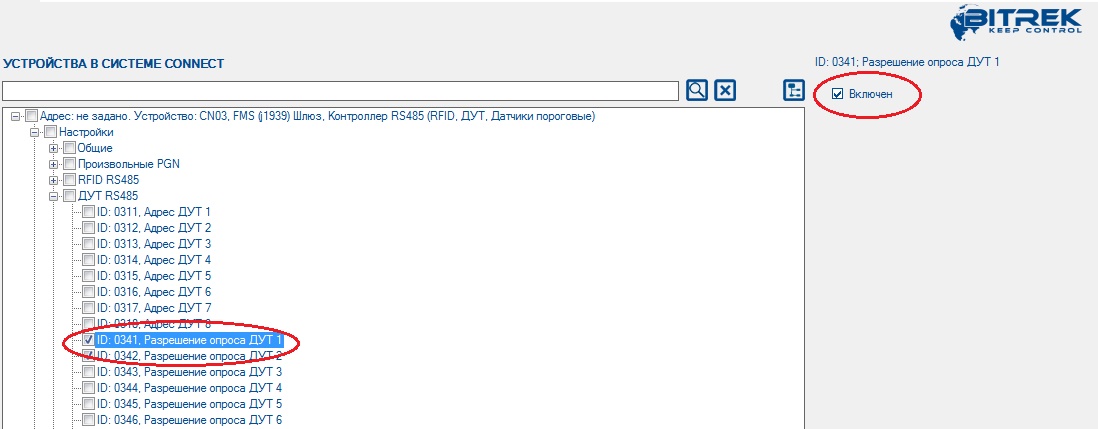
Рис.16. Разрешение опроса датчиков уровня топлива
Настройка модуля для работы со считывателем RFID производится аналогичным образом: указывается адрес считывателя на шине RS485 (в нашем примере это 9-й адрес), разрешается опрос считывателя, отмечаются параметры для отправки модулю и отправляется команда (Рис.17).
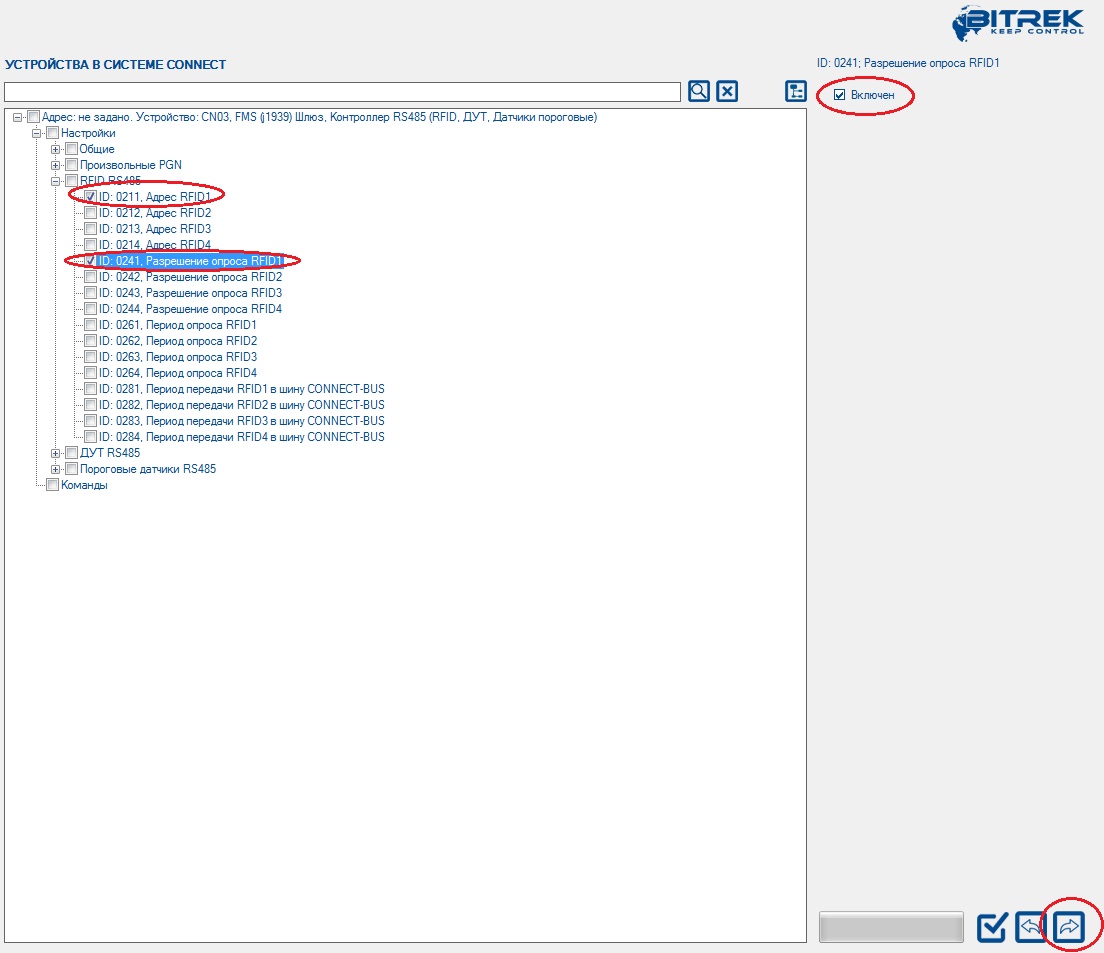
Рис.17. Конфигурирование модуля CN для работы со считывателем RFID
После этого модуль CN будет производить опрос 1, 2 и 9 сетевого адреса на шине RS485. Полученные данные от устройств модуль будет транслировать в шину CONNECT-BUS.
Конфигурирование трекера
Настройка трекера производится аналогичным образом. В списке параметров устройства необходимо выбрать нужные параметры, ввести их значения в соответствующем поле и отправить команды устройству. Список всех доступных для настройки параметров находится в руководстве по настройке и эксплуатации к соответствующему модулю системы, в т. ч. и трекеру.
Минимальный набор необходимых для работы трекера параметров – это точка доступа GPRS, IP-адрес сервера, порт сервера. Выбираем нужные параметры, указываем необходимые значения в поле и нажимаем кнопку «Отправить». Об успешной отправке параметров можно судить по состоянию строки отправки команд.
Следует иметь ввиду, что для удобства можно настроить сразу несколько устройств и отправить выбранные в списке параметры сразу нескольким устройствам на шине Connect-Bus.
Кроме этого, для просмотра уже записанных параметров можно воспользоваться функцией запроса параметров. Для этого в списке доступных параметров необходимо отметить нужные для просмотра параметры и запросить их с устройств, подключенных к шине. Так же, когда необходимо запросить с устройств Connect все доступные параметры или отправить всем устройствам сразу все параметры – можно воспользоваться функцией выбора всех доступных параметров одновременно. Для этого на панели инструментов необходимо нажать кнопку «Выбрать все параметры». Для отмены выбора необходимо повторно нажать эту же кнопку.
Следует иметь в виду, что в случае выбора одновременно всех параметров, их запрос и отправка могут занимать длительное время. При этом, чем больше устройств в данный момент подключено к шине Connect-Bus, тем дольше будет производиться запрос/отправка команд.
Настройка трекера на прием и обработку переменных
Все переменные, транслируемые модулями в шину Connect-Bus, могут быть «захвачены» трекером и переданы на сервер как стандартные I/O-элементы (Дополнение 1). Для настройки трекера на прием и обработку переменных необходимо воспользоваться списком переменных, транслируемых в шину Connect-Bus и группой настроек «CAN-датчики» в списке настроек трекера.
На рис. 18 показаны необходимые для настройки параметры. Выбранный для примера модуль CN может транслировать в шину большое количество различных переменных. Все эти переменные разбиты на соответствующие группы. Для датчиков уровня топлива и RFID-считывателей есть соответствующие подгруппы: «ДУТ RS485» и «RFID RS485».
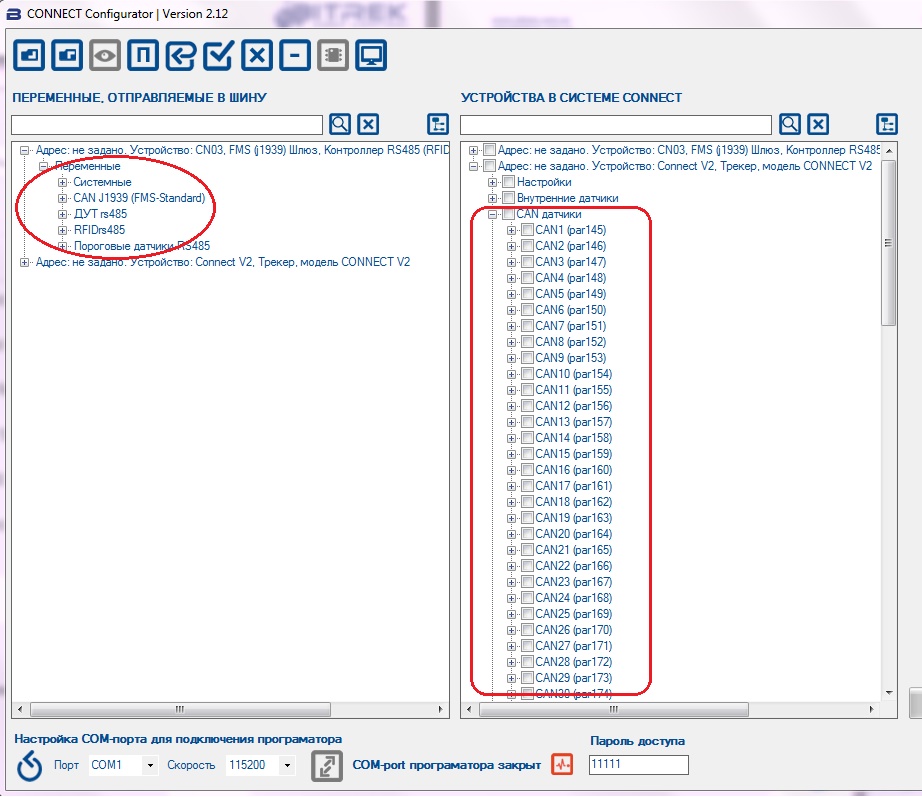
Рис.18. Настройка переменных для передачи на сервер
В подгруппе переменных «ДУТ RS485» отображаются следующие переменные, которые могут быть транслированы в шину: «Статус ДУТ», «Температура ДУТ», «Топливо ДУТ». Для модуля CN максимально допустимое количество подключаемых датчиков уровня топлива составляет 8 шт. Поэтому все транслируемые переменные настраиваются отдельно для восьми датчиков (Рис.19).
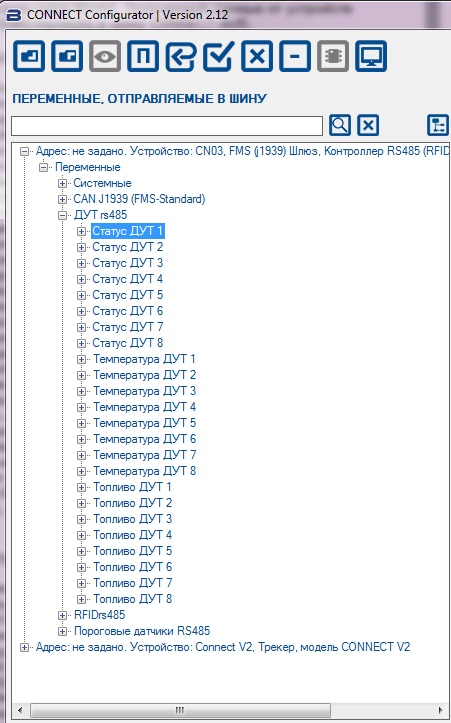
Рис. 19. Список переменных для датчиков уровня топлива
В подгруппе переменных «RFID RS485» доступны для настройки всего две переменные: Статус RFID и Номер карты RFID. Всего к модулю может быть подключено до четырех RFID-считывателей. Каждая переменная, транслируемая в шину, имеет ряд параметров, которые доступны для просмотра в списке переменных.
Трекер позволяет передавать на сервер до 100 CAN-датчиков одновременно (CAN1 – CAN100). Каждая такая переменная имеет в свою очередь две подгруппы настроек: «I/O» и «CAN» (Рис.20).
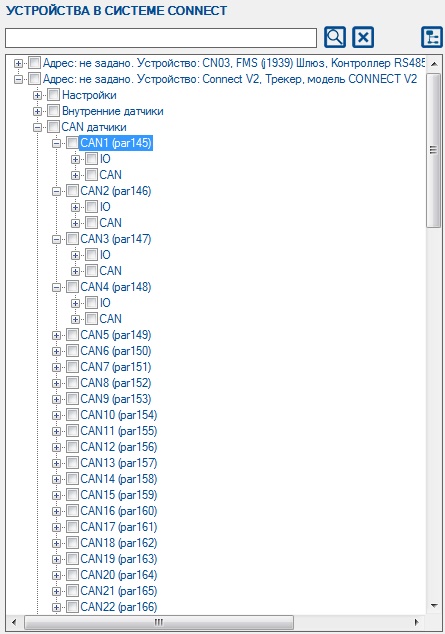
Рис.20. Структура переменных CAN-датчиков трекера
Настройка переменных, которые будут транслироваться трекером на сервер, выполняется путём их перетаскивания из левой части окна конфигуратора на одну из переменных «CAN-датчики» в правой части окна.
Например: В подгруппе переменных «ДУТ RS485» модуля CN выделяем переменную «Топливо ДУТ1» и, удерживая нажатой левую кнопку мыши, перетаскиваем ее в переменную CAN1. Схематически это показано на Рис. 16. После этого все необходимые параметры переменной «Топливо ДУТ1» будут автоматически записаны в CAN-подгруппу переменной CAN1. При этом название переменной CAN1 примет соответствующее название.
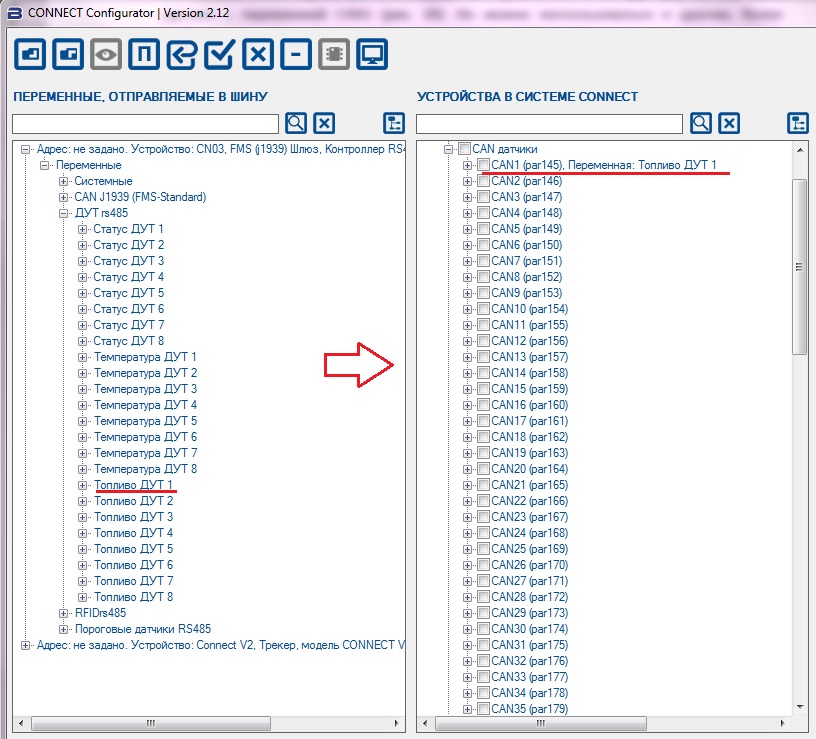
Рис.21. Перемещение переменной «Топливо ДУТ1» в переменную CAN1.
Таким образом, параметры CAN-подгруппы будут заполнены автоматически и следующий шаг – это настройка параметров I/O подгруппы. Для этого раскрываем список переменной CAN1 трекера и выделяем I/O-подгруппу.
Так как мы работаем с переменной уровня топлива, то настроим I/O-элемент в режим мониторинга. Для этого устанавливаем следующие параметры: состояние датчика – включен, приоритет низкий, нижняя граница – 0, верхняя граница – 0, тип события – мониторинг, усреднение – 10. Внешний вид окна настроек представлен на Рис. 22

Рис.22. Настройка параметров I/O-подгруппы
После изменения параметров необходимо их отметить и отправить устройствам.
При необходимости все настройки можно сохранить в конфигурационный файл и в дальнейшем не настраивать весь проект заново, а воспользоваться готовым конфигурационным файлом.
Важно чтобы сетевые адреса устройств, сохраненные в файле конфигурации, совпадали с адресами реальных устройств на шине Connect-Bus. В случае если используется настройка системы с помощью конфигурационного файла, необходимо придерживаться следующей последовательности действий:
- Присвоить модулям сетевые адреса согласно файлу конфигурации;
- Подключить модули к шине Connect-Bus;
- Выполнить поиск устройств на шине;
- Убедиться, что все модули найдены и сетевые адреса назначены верно;
- Нажать кнопку «Очистить проект»;
- Открыть конфигурационный файл;
- Выбрать необходимые настройки и отправить их модулям.
По приведенному в данном руководстве принципу настраиваются все модули системы.
Дополнение 1. Настройка I/O элементов
Каждый датчик трекера является I/O элементом и для настройки имеет группу, состоящую из 6 параметров. Например, для настройки передачи на сервер значения уровня напряжения источника питания, используется группа параметров ID 0410/0411/0412/0413/0414/0415. Эти параметры имеют следующую структуру:
0410/0411/0412/0413/0414/0415
Первые 3 цифры (выделены жирным) – номер группы параметров для настройки I/O элемента.
Последняя цифра (выделенная моношрифтом) – номер параметра. Для одного I/O элемента существуют 6 параметров (от 0 до 5). Возможные значения этих параметров представлены в таблице 1.
Таблица 1 – Список параметров I/O элемента
| Номер параметра | Описание | Возможные значения |
|---|---|---|
| 0 | Включение/выключение I/O элемента | 0 – выключен; 1 - включен |
| 1 | Приоритет I/O элемента при отправке | 0 – низкий; 1 - высокий |
| 2 | Верхняя граница | (зависит от типа I/O элемента) |
| 3 | Нижняя граница | (зависит от типа I/O элемента) |
| 4 | Установка типа генерируемого события | 0 – вход в диапазон; 1 – выход из диапазона; 2 – возврат/выход в/из диапазона; 3 – мониторинг; 4 – мониторинг + вход в диапазон; 5 – мониторинг + выход из диапазона; 6 – мониторинг + возврат/выход в/из диапазона; 7 – генерация события по изменению входной величины на заданное значение; 8 – генерация события по изменению входной величины на заданное значение + мониторинг |
| 5 | Константа усреднения | От 0 и выше |
Пояснения к таблице 1:
Параметр 0 – включение/выключение передачи I/O элемента на сервер.
Параметр 1 - Приоритет: низкий/высокий. При выборе «Приоритет: низкий» данные датчика будут отправлены на сервер со следующим пакетом данных. При выборе «Приоритет: высокий» данные будут отправлены на сервер при первой возможности;
Параметр 2 - Верхняя граница – установка верней границы I/O элемента;
Параметр 3 - Нижняя граница – установка нижней границы I/O элемента;
Параметр 4 – Установка типа генерируемого события:
0 - Возврат в диапазон.
Если задан определенный диапазон значений датчика (диапазон значений задается следующим образом – нижняя граница диапазона записывается в соответствующий параметр – «Нижняя граница», верхняя граница – соответственно в параметр «Верхняя граница»), то событие будет сгенерировано в момент, когда фактическое значение датчика зайдет в заданный диапазон. В других случаях событие создано не будет и информация на сервер не будет передана. Пример: Нижний порог напряжения питания задан 0 В, верхний порог – 10 В (10000 мВ). При понижении напряжения ниже 10 В будет сгенерировано событие (Рис. 18).
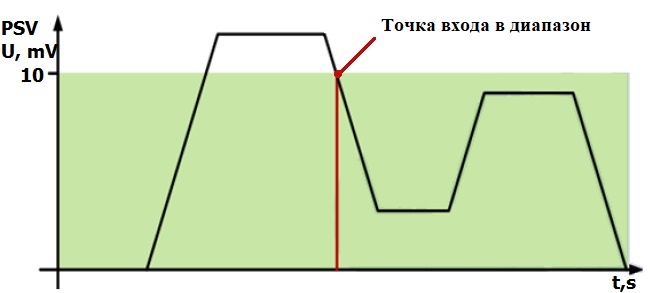
Рис.18. Генерация события по возврату в диапазон
1 - Выход из диапазона.
Событие будет генерироваться в том случае, если фактическое значение датчика выйдет за пределы заданного диапазона.
Пример: Нижний порог напряжения питания задан 0 В, верхний порог – 10 В (10000 мВ). При повышении напряжения выше 10 В будет сгенерировано событие (Рис. 19).
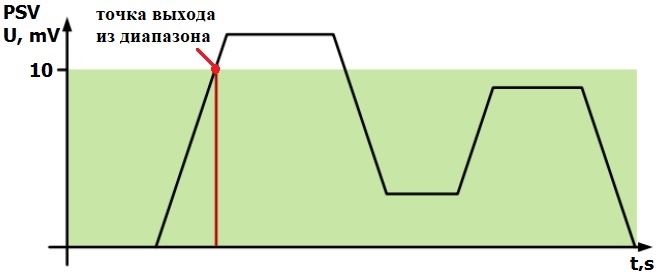
Рис.19. Генерация события по выходу их диапазона
2 - Возврат/выход в/из диапазона. Событие будет сгенерировано каждый раз, когда фактическое значение датчика будет пересекать границы заданного диапазона.
Пример: Нижний порог напряжения питания задан 5 В (5000 мВ), верхний порог – 10 В (10000 мВ). Кода фактическое напряжение пересекает границы заданного диапазона, генерируется событие (Рис. 20).
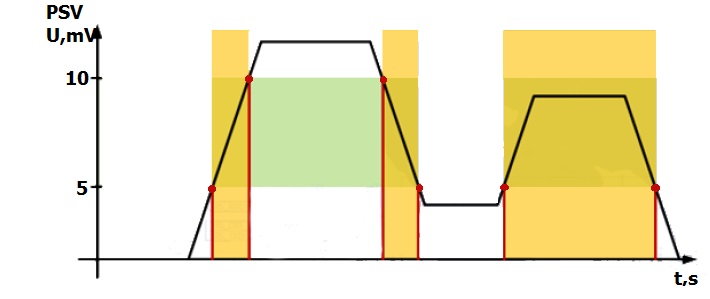
Рис.20. Генерация события по возврату/выходу в/из диапазона
3 - Мониторинг.
При выборе этого режима данные будут передаваться постоянно, события генерироваться не будут.
4 - Мониторинг + вход в диапазон.
Когда событие по входу в диапазон сгенерировано, фактическое значение датчика начинает передаваться на сервер в режиме мониторинга.
5 - Мониторинг + выход из диапазона.
Когда событие по выходу из диапазона будет сгенерировано, фактическое значение датчика начинает передаваться на сервер в режиме мониторинга.
6 - Мониторинг + возврат/выход в/из диапазона.
Когда одно из событий будет с генерировано, фактическое значение датчика начинает передаваться на сервер.
7 - Изменение входной величины на заданное значение.
При изменении входной величины на заданное значение в любую сторону будет сгенерировано событие. Значение величины записывается в параметр «Верхняя граница».
8 - Мониторинг + изменение входной величины на заданное значение.
Когда событие сгенерировано, фактическое значение датчика начинает передаваться на сервер.
Параметр 5 – Константа усреднения - это время, в течение которого I/O элемент должен находиться в определенном состоянии, чтобы сгенерировалось событие. Измеряется в миллисекундах (X*50 мс, т.е. при установке значения 10, константа будет равна 10*50=500 мс).